- Матрица (математика)
-
Ма́трица — математический объект, записываемый в виде прямоугольной таблицы элементов кольца или поля (например, целых, действительных или комплексных чисел), которая представляет собой совокупность строк и столбцов, на пересечении которых находятся её элементы. Количество строк и столбцов матрицы задают размер матрицы. Хотя исторически рассматривались, например, треугольные матрицы[1], в настоящее время говорят исключительно о матрицах прямоугольной формы, так как они являются наиболее удобными и общими.
Матрицы широко применяются в математике для компактной записи систем линейных алгебраических или дифференциальных уравнений. В этом случае, количество строк матрицы соответствует числу уравнений, а количество столбцов — количеству неизвестных. В результате решение систем линейных уравнений сводится к операциям над матрицами.
Для матрицы определены следующие алгебраические операции:
- сложение матриц, имеющих один и тот же размер;
- умножение матриц подходящего размера (матрицу, имеющую
 столбцов, можно умножить справа на матрицу, имеющую строк);
столбцов, можно умножить справа на матрицу, имеющую строк); - в том числе умножение на матрицу вектора (по обычному правилу матричного умножения; вектор является в этом смысле частным случаем матрицы);
- умножение матрицы на элемент основного кольца или поля (то есть скаляр).
Относительно сложения матрицы образуют абелеву группу; если же рассматривать ещё и умножение на скаляр, то матрицы образуют модуль над соответствующим кольцом (векторное пространство над полем). Множество квадратных матриц замкнуто относительно матричного умножения, поэтому квадратные матрицы одного размера образуют ассоциативное кольцо с единицей относительно матричного сложения и матричного умножения.
Доказано, что каждому линейному оператору, действующему в n-мерном линейном пространстве, можно сопоставить единственную квадратную матрицу порядка n; и обратно — каждой квадратной матрице порядка n может быть сопоставлен единственный линейный оператор, действующий в этом пространстве.[2] Свойства матрицы соответствуют свойствам линейного оператора. В частности, собственные числа матрицы — это собственные числа оператора, отвечающие соответствующим собственным векторам.
То же можно сказать о представлении матрицами билинейный (квадратичных) форм.
В математике рассматривается множество различных типов и видов матриц. Таковы, например, единичная, симметричная, кососимметричная, верхнетреугольная (нижнетреугольная) и т. п. матрицы.
Особое значение в теории матриц занимают всевозможные нормальные формы, то есть канонический вид, к которому можно привести матрицу заменой координат. Наиболее важной (в теоретическом значении) и проработанной является теория жордановых нормальных форм. На практике, однако, используются такие нормальные формы, которые обладают дополнительными свойствами, например, устойчивостью.
История
Впервые матрицы упоминались ещё в древнем Китае, называясь тогда «волшебным квадратом». Основным применением матриц было решение линейных уравнений. Также волшебные квадраты были известны чуть позднее у арабских математиков, примерно тогда появился принцип сложения матриц. После развития теории определителей в конце 17-го века, Габриэль Крамер начал разрабатывать свою теорию в 18-ом столетии и опубликовал «правило Крамера» в 1751 году. Примерно в этом же промежутке времени появился «метод Гаусса». Теория матриц начала своё существование в середине XIX века в работах Уильяма Гамильтона и Артура Кэли. Фундаментальные результаты в теории матриц принадлежат Вейерштрассу, Жордану, Фробениусу. Термин «матрица» ввел Джеймс Сильвестр в 1850 г.[3]
Определение
Пусть есть два конечных множества
 и
и  , где
, где  и — натуральные числа.
и — натуральные числа.Назовём матрицей размера
 (читается на ) с элементами из некоторого кольца или поля
(читается на ) с элементами из некоторого кольца или поля  отображение вида
отображение вида .
.
 называется элементом матрицы, находящимся на пересечении
называется элементом матрицы, находящимся на пересечении  -той строки и
-той строки и  -ого столбца;
-ого столбца;- -ая строка матрицы состоит из элементов вида , где пробегает всё множество
 ;
; - -ый столбец матрицы состоит из элементов вида , где пробегает всё множество
 .
.
Если индекс
пробегает множество , а пробегает множество , то совокупность элементов полностью определяет матрицу.Таким образом, матрица размера
состоит в точности из- строк (по элементов в каждом)
- и столбцов (по элементов в каждом)
- или
 элементов.
элементов.
В соответствии с этим
- каждую строку матрицы можно интерпретировать как вектор в -мерном координатном пространстве
 ;
; - каждый столбец матрицы — как вектор в -мерном координатном пространстве
 .
.
Сама матрица естественным образом интерпретируется как вектор в пространстве
 , имеющем размерность . Это позволяет ввести покомпонентное сложение матриц и умножение матрицы на число (см. ниже); что касается матричного умножения, то оно существенным образом опирается на прямоугольную структуру матрицы.
, имеющем размерность . Это позволяет ввести покомпонентное сложение матриц и умножение матрицы на число (см. ниже); что касается матричного умножения, то оно существенным образом опирается на прямоугольную структуру матрицы.Если у матрицы количество строк
совпадает с количеством столбцов , то такая матрица называется квадратной, а число  называется размером квадратной матрицы или её порядком.
называется размером квадратной матрицы или её порядком.Обозначения
Обычно матрицу обозначают заглавной буквой латинского алфавита: пусть
- ,
тогда
 — матрица, которая интерпретируется как прямоугольный массив элементов поля вида
— матрица, которая интерпретируется как прямоугольный массив элементов поля вида  , где
, где- первый индекс означает индекс строки:
 ;
; - второй индекс означает индекс столбца:
 ;
;
таким образом,
 — элемент матрицы , находящийся на пересечении -той строки и -того столбца. В соответствии с этим принято следующее компактное обозначение для матрицы размера :
— элемент матрицы , находящийся на пересечении -той строки и -того столбца. В соответствии с этим принято следующее компактное обозначение для матрицы размера :или просто:
если нужно просто указать обозначение для элементов матрицы.
Иногда, вместо
, пишут  , чтобы отделить индексы друг от друга и избежать смешения с произведением двух чисел.
, чтобы отделить индексы друг от друга и избежать смешения с произведением двух чисел.Если необходимо дать развёрнутое представление матрицы в виде таблицы, то используют запись вида
Можно встретить как обозначения с круглыми скобками «(…)», так и обозначения с квадратными скобками «[…]». Реже можно встретить обозначения с двойными прямыми линиями "||…||").
Поскольку матрица состоит из строк и столбцов, для них используются следующие обозначения:
![a_{i\cdot}=A_i=[
\begin{array}{ccccc}
a_{i1} & \cdots & a_{ij} & \cdots & a_{in} \\
\end{array}]](37b195f614ee8e52598b93b16b08272e.png) — это -тая строка матрицы ,
— это -тая строка матрицы ,
а
![a_{\cdot j}=A^j=\left[
\begin{array}{c}
a_{1j}\\\vdots \\a_{ij} \\\vdots \\a_{mj} \\
\end{array}\right]](f3fb10d0fba08ef86ea1267a2ccf169f.png) — это -тый столбец матрицы .
— это -тый столбец матрицы .
Таким образом, матрица обладает двойственным представлением — по строкам:
и по столбцам:
![A=\left[
\begin{array}{c}
A_{1}\\\vdots \\A_{i} \\\vdots \\A_{m} \\
\end{array}\right]](61b95775ba589ad65bda6edb3caea61b.png) .
.
Такое представление позволяет формулировать свойства матриц в терминах строк или в терминах столбцов.
Транспонированная матрица
С каждой матрицей
 размера связана матрица
размера связана матрица  размера
размера  вида
видаТакая матрица называется транспонированной матрицей для
и обозначается так  .
.Транспонированную матрицу можно получить, поменяв строки и столбцы матрицы местами. Матрица
размера при этом преобразовании станет матрицей размерностью .Диагональная матрица
Диагональная матрица — квадратная матрица, все элементы которой кроме диагональных — нулевые
 , иногда записывается как:
, иногда записывается как:Единичная матрица
Единичная матрица — матрица, при умножении на которую любая матрица (или вектор) остается неизменной, является диагональной матрицей с единичными (всеми) диагональными элементами:
Для ее обозначения чаще всего используется обозначение I или E, а также просто 1 (или 1 специальным шрифтом).
Для обозначения ее элементов также используется символ Кронекера
 , определяемый как:
, определяемый как:
 при
при 
Нулевая матрица
Для обозначения нулевой матрицы — матрицы, все элементы которой нули (при сложении ее с любой матрицей та остается неизменной, а при умножении на любую получается нулевая матрица) — используется обычно просто 0 или 0 специальным шрифтом, или буква, начертанием похожая на ноль, например
 .
.Вектор-строка и вектор-столбец
Матрицы размера
 и
и  являются элементами пространств и соответственно:
являются элементами пространств и соответственно:- матрица размера называется вектор-столбцом и имеет специальное обозначение:
- матрица размера называется вектор-строкой и имеет специальное обозначение:
Операции над матрицами
Умножение матрицы на число
Умножение матрицы
на число  (обозначение:
(обозначение:  ) заключается в построении матрицы
) заключается в построении матрицы  , элементы которой получены путём умножения каждого элемента матрицы на это число, то есть каждый элемент матрицы равен
, элементы которой получены путём умножения каждого элемента матрицы на это число, то есть каждый элемент матрицы равенСвойства умножения матриц на число:
- 1. 1A = A;
- 2. (λβ)A = λ(βA)
- 3. (λ+β)A = λA + βA
- 4. λ(A+B) = λA + λB
Сложение матриц
Сложение матриц
 есть операция нахождения матрицы
есть операция нахождения матрицы  , все элементы которой равны попарной сумме всех соответствующих элементов матриц и , то есть каждый элемент матрицы равен
, все элементы которой равны попарной сумме всех соответствующих элементов матриц и , то есть каждый элемент матрицы равенСвойства сложения матриц:
- 1.коммутативность: A+B = B+A;
- 2.ассоциативность: (A+B)+C =A+(B+C);
- 3.сложение с нулевой матрицей: A + Θ = A;
- 4.существование противоположной матрицы: A + (-A) = Θ;
Все свойства линейных операций повторяют аксиомы линейного пространства и поэтому справедлива теорема:
Множество всех матриц одинаковых размеров mxn с элементами из поля P (поля всех действительных или комплексных чисел) образуют линейное пространство над полем P (каждая такая матрица является вектором этого пространства). Впрочем, прежде всего во избежание терминологической путаницы, матрицы в обычных контекстах избегают без необходимости (которой нет в наиболее обычных стандартных применениях) и четкого уточнения употребления термина называть векторами.
Умножение матриц
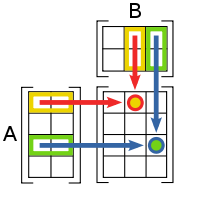
Умножение матриц (обозначение:
 , реже со знаком умножения
, реже со знаком умножения  ) — есть операция вычисления матрицы , каждый элемент которой равен сумме произведений элементов в соответствующей строке первого множителя и столбце второго.
) — есть операция вычисления матрицы , каждый элемент которой равен сумме произведений элементов в соответствующей строке первого множителя и столбце второго.Количество столбцов в матрице
должно совпадать с количеством строк в матрице , иными словами, матрица обязана быть согласованной с матрицей . Если матрица имеет размерность , —  , то размерность их произведения
, то размерность их произведения  есть
есть  .
.Свойства умножения матриц:
- 1.ассоциативность (AB)C = A(BC);
- 2.некоммутативность (в общем случае): AB
 BA;
BA;
- 3.произведение коммутативно в случае умножения с единичной матрицей: AI = IA;
- 4.дистрибутивность: (A+B)C = AC + BC, A(B+C) = AB + AC;
- 5.ассоциативность и коммутативность относительно умножения на число: (λA)B = λ(AB) = A(λB);
Умножение вектора на матрицу
По обычным правилам матричного умножения осуществляется умножение на матрицу слева вектора-столбца, а также умножение вектора-строки на матрицу справа. Поскольку элементы вектора-столбца или вектора-строки можно записать (что обычно и делается), используя один, а не два индекса, это умножение можно записать так:
для вектора-столбца v (получая новый вектор-столбец Av):
для вектора-строки s (получая новый вектор-строку sA):Вектор-строка, матрица и вектор столбец могут быть умножены друг на друга, давая число (скаляр):
(Порядок важен: вектор-строка слева, вектор-столбец справа от матрицы).
Эти операции являются основой матричного представления линейных операторов и линейных преобразований координат (смены базисов), таких, как повороты, масштабирования, зеркальные отражения, а также (последнее) матричного представления билинейных (квадратичных форм.
- При представлении вектора вещественного векторного пространства в ортонормированном базисе (что эквивалентно использованию прямоугольных декартовых координат) соответствующие ему вектор-столбец и вектор-строка, представляющие собой набор компонент вектора, будут совпадать (поэлементно), отличаясь лишь формально своим изображением для корректности матричных операций (то есть один получается из другого просто операцией транспонирования). При использовании же неортонормированных базисов (например, косоугольных координат или хотя бы разных масштабов по осям) вектор-столбец соответствует компонентам вектора в основном базисе, а вектор-строка — в базисе, дуальном основному[4] (Иногда о пространстве векторов-строк говорят также как об особом, дуальном пространству векторов-столбцов, пространстве ковекторов).
Заметим, что обычной мотивировкой введения матриц и определения операции матричного умножения (см.тж.в статье об умножении матриц) является именно введение их, начиная с умножения вектора на матрицу (которое вводится исходя из преобразований базиса или вообще линейных операций над векторами), а уже затем композиции преобразований сопоставляется произведение матриц. Действительно, если новый вектор Av, полученный из исходного вектора v преобразованием, представимым умножением на матрицу A, преобразовать теперь еще раз, преобразованием, представимым умножением на матрицу B, получив B(Av), то, исходя из правила умножения вектора на матрицу, приведенного в начале этого параграфа (используя ассоциативность умножения чисел и меняя порядок суммирования), нетрудно увидеть в результате формулу, дающую элементы матрицы (BA), представляющую композицию первого и второго преобразований, и совпадающую с обычным определением матричного умножения.
Комплексное сопряжение
Если элементами матрицы
являются комплексные числа, то комплексно сопряжённая (не путать с эрмитово сопряжённой! см. далее) матрица равна  . Здесь
. Здесь  — число, комплексно сопряжённое к
— число, комплексно сопряжённое к  .
.Транспонирование и эрмитово сопряжение
Транспонирование уже обсуждалось выше: если
, то  . Для комплексных матриц более употребительно эрмитово сопряжение:
. Для комплексных матриц более употребительно эрмитово сопряжение:  . С точки зрения операторного взгляда на матрицы, транспонированная и эрмитово сопряжённая матрица — это матрицы оператора, сопряжённого относительно скалярного или эрмитова произведения, соответственно.
. С точки зрения операторного взгляда на матрицы, транспонированная и эрмитово сопряжённая матрица — это матрицы оператора, сопряжённого относительно скалярного или эрмитова произведения, соответственно.След
Для квадратной матрицы определен след:
(иногда также обозначается как Sp или Spur).
Является инвариантом ортогональных (унитарных) преобразований матрицы, соответствующих преобразованию матричного представления линейного оператора или билинейной (квадратичной) формы при соотвестствующем преобразовании векторного пространства (например, вращении).
Определитель (детерминант)
Перманент
Линейные трансформации
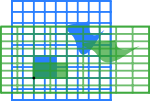
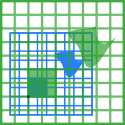
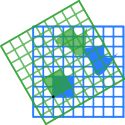
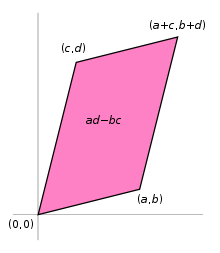 Векторы представлены как матрица 2 x 2, образованная сторонами соответствующего единичного квадрата, трансформируемого в параллелограмм.
Векторы представлены как матрица 2 x 2, образованная сторонами соответствующего единичного квадрата, трансформируемого в параллелограмм.
Матрицы и их произведения выявляют их существенные особенности, когда это связано с линейными преобразованиями, так же известными, как линейные карты. Матрица A вещественных чисел размера m × n порождает линейное преобразование Rn → Rm отображая каждый вектор x в Rn на новую матрицу Ax, которая является вектором Rm. Наоборот, каждое линейное преобразование f: Rn → Rm вытекает из уникальной m × n матрицы A: явно (i, j)-вхождение матрицы A есть i-тая координата f(ej), где ej = (0,…,0,1,0,…,0) является единичным вектором с единицей в j-той позиции и 0 в остальных случаях. Матрица A как говорят, представляет собой линейную карту f, и называется матрицей трансформирования f.
Для примера матрица 2×2
может быть рассмотрена при трансформации единичного квадрата в параллелограмм с вершинами (0, 0), (a, b), (a + c, b + d), и (c, d). Параллелограмм, показанный на рисунке справа получается путем умножения матрицы A на каждый вектор-столбец
 и
и  . Эти векторы определяют вершины единицы площади.
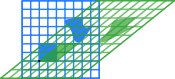
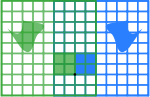
. Эти векторы определяют вершины единицы площади.В следующей таблице показаны матрицы 2 × 2 вещественных чисел с соответствующими им линейными картами R2. Синим цветом обозначена исходная карта, а зеленым — трансформированная and shapes. Начало (0,0) обозначено черной точкой.
Горизонтальный сдвиг (m=1.25) Горизонтальный поворот Сжатие (r=3/2) Масштабирование (3/2) Поворот (π/6R = 30°) 




Связанные понятия
Линейные комбинации
В векторном пространстве линейной комбинацией векторов
 называется вектор
называется векторгде
 — коэффициенты разложения:
— коэффициенты разложения:- если все коэффициенты равны нулю, то такая комбинация называется тривиальной,
- если же хотя бы один коэффициент отличен от нуля, то такая комбинация называется нетривиальной.
Это позволяет описать произведение
 матриц и терминах линейных комбинаций:
матриц и терминах линейных комбинаций:- столбцы матрицы — это линейные комбинации столбцов матрицы с коэффициентами, взятыми из матрицы ;
- строки матрицы — это линейные комбинации строк матрицы с коэффициентами, взятыми из матрицы .
Линейная зависимость
Если какой-либо вектор можно представить в виде линейной комбинации, то говорят о линейной зависимости данного вектора от элементов комбинации.
Точнее, говорят так: некоторая совокупность элементов векторного пространства называется линейно зависимой, если существует равная нулю линейная комбинация элементов данной совокупности или
где не все числа
равны нулю; если такой нетривиальной комбинации не существует, то данная совокупность векторов называется линейно независимой.Линейная зависимость векторов означает, что какой-то вектор заданной совокупности линейно выражается через остальные векторы.
Каждая матрица представляет собой совокупность векторов (одного и того же пространства). Две такие матрицы — две совокупности. Если каждый вектор одной совокупности линейно выражается через векторы другой совокупности, то на языке теории матриц этот факт описывается при помощи произведения матриц:
- если строки матрицы линейно зависят от строк матрицы , то для некоторой матрицы ;
- если столбцы матрицы линейно зависят от столбцов другой матрицы , то для некоторой матрицы .
Ранг матрицы
Количество линейно независимых строк матрицы называют строчным рангом матрицы, а количество линейно независимых столбцов матрицы называют столбцовым рангом матрицы. В действительности, оба ранга совпадают. Их общее значение и называется рангом матрицы.
Другой эквивалентный данному подход заключается в определении ранга матрицы, как максимального порядка отличного от нуля минора матрицы.
Свойства
Матричные операции
Сложение и вычитание допускается только для матриц одинакового размера.
Существует нулевая матрица
такая, что её прибавление к другой матрице A не изменяет A, то естьВсе элементы нулевой матрицы равны нулю.
Возводить в степень можно только квадратные матрицы.
- Ассоциативность сложения:

- Коммутативность сложения:

- Ассоциативность умножения:

- Вообще говоря, умножение матриц некоммутативно:
 . Используя это свойство, вводят коммутатор матриц.
. Используя это свойство, вводят коммутатор матриц. - Дистрибутивность умножения относительно сложения:
- С учётом упомянутых выше свойств, матрицы образуют кольцо относительно операций сложения и умножения.
- Свойства операции транспонирования матриц:


 , если обратная матрица
, если обратная матрица  существует.
существует.

Примеры
Матрица как запись коэффициентов системы линейных уравнений
Систему из
линейных уравнений с неизвестнымиможно представить в матричном виде
и тогда всю систему линейных уравнений можно записать так:
 ,
,
где
имеет смысл таблицы коэффициентов системы линейных уравнений.Если
и матрица невырожденная, то решение этого уравнения состоит в нахождении обратной матрицы , поскольку умножив обе части уравнения на эту матрицу слева — превращается в
— превращается в  (единичную матрицу). И это даёт возможность получить столбец корней уравнений
(единичную матрицу). И это даёт возможность получить столбец корней уравнений .
.
Все правила, по которым проводятся операции над матрицами, выводятся из операций над системами уравнений.
Квадратная матрица и смежные определения
Если количество строк матрицы равно количеству столбцов, то такая матрица называется квадратной.
Для квадратных матриц существует единичная матрица
(аналог единицы для операции умножения чисел) такая, что умножение любой матрицы на неё не влияет на результат, а именноУ единичной матрицы единицы стоят только по главной диагонали, остальные элементы равны нулю
Для некоторых квадратных матриц можно найти так называемую обратную матрицу. Обратная матрица
такова, что если матрицу умножить на обратную ей матрицу, то получится единичная матрица:Обратная матрица существует не всегда. Матрицы, для которых обратная матрица существует, называются невырожденными (или регулярными), а для которых нет — вырожденными (или сингулярными). Матрица невырождена, если все ее строки (столбцы) линейно независимы как векторы. Максимальное число линейно независимых строк (столбцов) называется рангом матрицы. Определителем (детерминантом) матрицы называется значение нормированной кососимметрической (антисимметрической) полилинейной формы валентности
 на столбцах матрицы. Квадратная матрица над числовым полем вырождена тогда и только тогда, когда ее определитель равен нулю.
на столбцах матрицы. Квадратная матрица над числовым полем вырождена тогда и только тогда, когда ее определитель равен нулю.Элементарные преобразования матриц
Элементарными преобразованиями строк матрицы называются следующие преобразования:
- Умножение строки на число отличное от нуля,
- Прибавление одной строки, умноженной на число, к другой строке,
- Перестановка местами двух строк.
Элементарные преобразование столбцов матрицы определяются аналогично. При элементарных преобразованиях ранг матрицы не меняется. А=(4 3 2)=
Матрица линейного оператора
Матрица линейного оператора — матрица, выражающая линейный оператор в некотором базисе. Для того, чтобы ее получить, необходимо подействовать оператором на векторы базиса и координаты полученных векторов (образов базисных векторов) записать в столбцы матрицы.
Матрица оператора аналогична координатам вектора. При этом действие оператора на вектор равносильно умножению матрицы на столбец координат этого вектора в том же базисе.
Выберем базис
 . Пусть
. Пусть  — произвольный вектор. Тогда его можно разложить по этому базису:
— произвольный вектор. Тогда его можно разложить по этому базису: ,
,
где
 — координаты вектора в выбранном базисе.
— координаты вектора в выбранном базисе.Здесь и далее предполагается суммирование по немым индексам.
Пусть
 — произвольный линейный оператор. Подействуем им на обе стороны предыдущего равенства, получим
— произвольный линейный оператор. Подействуем им на обе стороны предыдущего равенства, получим .
.
Вектора
 также разложим в выбранном базисе, получим
также разложим в выбранном базисе, получим ,
,
где
 — -я координата
— -я координата  -го вектора из .
-го вектора из .Подставим разложение в предыдущую формулу, получим
 .
.
Выражение
 , заключённое в скобки, есть ни что иное, как формула умножения матрицы на столбец, и, таким образом, матрица при умножении на столбец даёт в результате координаты вектора
, заключённое в скобки, есть ни что иное, как формула умножения матрицы на столбец, и, таким образом, матрица при умножении на столбец даёт в результате координаты вектора  , возникшего от действия оператора на вектор , что и требовалось получить.
, возникшего от действия оператора на вектор , что и требовалось получить. Комментарий: Если в полученной матрице поменять местами пару столбцов или строк, то мы, вообще говоря, получим уже другую матрицу, соответствующую тому же набору базисных элементов . Иными словами, порядок базисных элементов предполагается жёстко упорядоченным.
Комментарий: Если в полученной матрице поменять местами пару столбцов или строк, то мы, вообще говоря, получим уже другую матрицу, соответствующую тому же набору базисных элементов . Иными словами, порядок базисных элементов предполагается жёстко упорядоченным.Матрицы в теории групп
Матрицы играют важную роль в теории групп. Они используются при построении общих линейных групп, специальных линейных групп, диагональных групп, треугольных групп, унитреугольных групп.
Конечную группу (в частности, симметрическую) можно (изоморфно) промоделировать матрицами перестановок (содержащими только «0» и «1»),например, для
 :
:  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Поле комплексных чисел может быть (изоморфно) промоделировано над полем
комплексных чисел может быть (изоморфно) промоделировано над полем  вещественных чисел:
вещественных чисел:для
 матричные аналоги
матричные аналоги  ,
,  , где
, где  ;
; соответствует
соответствует  ;
; соответствует
соответствует  ;
; соответствует
соответствует  ;
; ;
; при
при  соответствует
соответствует  при
при  ;
; соответствует
соответствует  .
.
В частности, для ,
, 
 соответствует
соответствует  ,
,где
 .
.Замечание. Модель имеет автоморфизм
 , то есть
, то есть 
Тело кватернионов может быть (изоморфно) промоделировано над полем вещественных чисел:
может быть (изоморфно) промоделировано над полем вещественных чисел:для
 матричный аналог
матричный аналог  , где
, где  .
.
Для того, чтобы кватерниону соответствовала матрица
соответствовала матрица  ,
,где
 ,
,  ,
,  ,
,  ,
,можно ввести базисные элементы
 ,
,  ,
,  ,
,  .
.Параметры должны удовлетворять условиям:
 и
и  .
.Существует 8 решений (8 представлений).
См. также
- Норма матрицы
- Определитель матрицы
- Собственные векторы, значения и пространства
- Массив — тип данных в программировании, соответствующий матрице (многомерность достигается вложенными массивами).
- Разрежённый массив — одна из компьютерных форм представления разреженных матриц.
- Линейные матричные неравенства — аппарат для решения задач синтеза законов управления.
- Лямбда-матрица
- Жорданова нормальная форма
- Список матриц
Примечания
- ↑ Под треугольными матрицами сейчас понимают матрицы, ненулевые элементы которых заполняют в таблице матрицы треугольную область, остальные же элементы — нули.
- ↑ Этот изоморфизм полностью задается выбором базиса в линейном пространстве: при фиксированном базисе изоморфизм фиксирован и таким образом реализована взаимная однозначность соответствия матриц операторам. Это не означает того, что такой изоморфизм в принципе единственный: в другом базисе тем же линейным операторам будут соответствовать другие матрицы (тоже взаимно однозначно при фиксации этого нового базиса).
- ↑ Даан-Дальмедико А., Пейффер Ж. Пути и лабиринты. Очерки по истории математики: Пер. с франц. — М.: Мир, 1986. — С. 397.
- ↑ Формально в этом определении всё симметрично, и можно было бы поменять «основной» и дуальный базис местами (они оба просто взаимно дуальны), однако принято именно описанное соглашение.
Литература
- Голуб Дж. (Gene H. Golub), Ван Лоун Ч. (Charles F. Van Loan) Матричные вычисления. — М.: Мир, 1999, 548с., ил. (ISBN 5-03-002406-9)
- Хорн Р. (Roger A. Horn), Джонсон Ч. (Charles C. Johnson) Матричный анализ. — М.: Мир, 1989, 655с., ил. (ISBN 5-03-001042-4)
- Наймарк М. А. Теория представлений групп. — М.: Наука, 1976.
- Беллман Р. Введение в теорию матриц. — М.: Мир, 1969 (djvu).
- Гантмахер Ф. Р. Теория матриц (2-е издание). — М.: Наука, 1966 (djvu).
- Ланкастер П. Теория матриц. — М.: Наука, 1973 (djvu).
- Соколов Н. П. Пространственные матрицы и их приложения. — М.: ГИФМЛ, 1960 (djvu).
- Халмош П. Конечномерные векторные пространства = Finite-dimensional vector spaces. — М.: Физматгиз, 1963. — 264 с.

Для улучшения этой статьи желательно?: - Проставив сноски, внести более точные указания на источники.
Матрицы Простой структуры Треугольные Треугольная • Нижнетреугольная • Верхнетреугольная • Унитреугольная
По алгебраическим свойствам Симметричность: Перестановочность: Коммутирующие матрицы • Антиперестановочная
Обратимость: Категория:- Матрицы


![\begin{pmatrix}
a_{11} & \cdots & a_{1j} & \cdots & a_{1n} \\
\vdots & \ddots & \vdots & \ddots & \vdots \\
a_{i1} & \cdots & a_{ij} & \cdots & a_{in} \\
\vdots & \ddots & \vdots & \ddots & \vdots \\
a_{m1} & \cdots & a_{mj} & \cdots & a_{mn}
\end{pmatrix},\quad\left[\begin{array}{ccccc}
a_{11} & \cdots & a_{1j} & \cdots & a_{1n} \\
\vdots & \ddots & \vdots & \ddots & \vdots \\
a_{i1} & \cdots & a_{ij} & \cdots & a_{in} \\
\vdots & \ddots & \vdots & \ddots & \vdots \\
a_{m1} & \cdots & a_{mj} & \cdots & a_{mn}
\end{array}\right],\quad\left\|\begin{array}{ccccc}
a_{11} & \cdots & a_{1j} & \cdots & a_{1n} \\
\vdots & \ddots & \vdots & \ddots & \vdots \\
a_{i1} & \cdots & a_{ij} & \cdots & a_{in} \\
\vdots & \ddots & \vdots & \ddots & \vdots \\
a_{m1} & \cdots & a_{mj} & \cdots & a_{mn}
\end{array}\right\|](b6361e67aed7a0ce77fd48584f4e7e76.png)
![A=[
\begin{array}{ccccc}
A^{1} & \cdots & A^{j} & \cdots & A^{n} \\
\end{array}]](fd3c9692a208a30e7cf98ad7e57d9a74.png)































Wikimedia Foundation. 2010.