- Полярная система координат
-
 Полярная сетка, на которой отложено несколько углов с пометками в градусах.
Полярная сетка, на которой отложено несколько углов с пометками в градусах.
Полярная система координат — двумерная система координат, в которой каждая точка на плоскости определяется двумя числами — полярным углом и полярным радиусом. Полярная система координат особенно полезна в случаях, когда отношения между точками проще изобразить в виде радиусов и углов; в более распространённой, декартовой или прямоугольной системе координат, такие отношения можно установить только путём применения тригонометрических уравнений.
Полярная система координат задаётся лучом, который называют нулевым или полярной осью. Точка, из которой выходит этот луч, называется началом координат или полюсом. Любая точка на плоскости определяется двумя полярными координатами: радиальной и угловой. Радиальная координата (обычно обозначается
 ) соответствует расстоянию от точки до начала координат. Угловая координата, также называется полярным углом или азимутом и обозначается
) соответствует расстоянию от точки до начала координат. Угловая координата, также называется полярным углом или азимутом и обозначается  , равна углу, на который нужно повернуть против часовой стрелки полярную ось для того, чтобы попасть в эту точку.[1]
, равна углу, на который нужно повернуть против часовой стрелки полярную ось для того, чтобы попасть в эту точку.[1]Определённая таким образом радиальная координата может принимать значения от нуля до бесконечности, а угловая координата изменяется в пределах от 0° до 360°. Однако, для удобства область значений полярной координаты можно расширить за пределы полного угла, а также разрешить ей принимать отрицательные значения, что отвечает повороту полярной оси по часовой стрелке.
Содержание
История
Понятие угла и радиуса были известны ещё в первом тысячелетии до н. э. Греческий астроном Гиппарх (190—120 гг до н. э.) создал таблицу, в которой для разных углов приводились длины хорд. Существуют свидетельства применения им полярных координат для определения положения небесных тел.[2] Архимед в своём сочинении «Спирали» описывает так называемую спираль Архимеда, функцию, радиус которой зависит от угла. Работы греческих исследователей, однако, не развились в целостное определение системы координат.
В IX веке персидский математик Хабас аль-Хасиб аль-Марвази применял методы картографических проекций и сферической тригонометрии для преобразования полярных координат в другую систему координат с центром в некоторой точке на сфере, в этом случае, для определения Киблы — направления на Мекку[3]. Персидский астроном Абу Райхан Бируни (973—1048) выдвинул идеи, которые выглядят как описание полярной системы координат.[4] Он был первым, кто, примерно в 1025 году, описал полярную экви-азимутальную равнопромежуточную проекцию небесной сферы[5].
Существуют разные версии о введении полярных координат в качестве формальной системы координат. Полная история возникновения и исследования описана в работе профессора из Гарварда Джулиан Лоувел Кулидж «Происхождение полярных координат»[6]. Грегуар де Сен-Венсан и Бонавентура Кавальери независимо друг от друга пришли к похожей концепции в середине XVII века. Сен-Венсан описал полярную систему в личных заметках в 1625 году, напечатав свои труды в 1647; а Кавальери напечатал свои труды в 1635 году, и исправленную версию в 1653 году. Кавельери применял полярные координаты для вычисления площади, ограниченной спирали Архимеда. Блез Паскаль впоследствии использовал полярные координаты для вычисления длин параболических дуг.
В книге «Методы флукций» (написана в 1671 году, напечатана в 1736 году) сэр Исаак Ньютон исследовал преобразование между полярными координатами, которые он обозначал как «Седьмой способ; Для спиралей» («англ. Seventh Manner; For Spirals»), и девятью другими системами координат[7]. В статье, опубликованной в 1691 году в журнале Acta eruditorum, Якоб Бернулли использовал систему с точкой на прямой, которые он назвал полюсом и полярной осью соответственно. Координаты задавались как расстояние от полюса и угол от полярной оси. Работа Бернулли была посвящена проблеме нахождения радиуса кривизны кривых, определённых в этой системе координат.
Введение термина «полярные координаты» приписывают Грегорио Фонтана. В XVIII веке он входил в лексикон итальянских авторов. В английский язык термин попал через перевод трактата Сильвестра Лакруа «Дифференциальное и интегральное исчисление», выполненного в 1816 году Джорджем Пикоком[8][9] Для трёхмерного пространства полярные координаты впервые предложил Алекси Клеро, а Леонард Эйлер был первым, кто разработал соответствующую систему[6].
Графическое представление
 Точка в полярной системе координат.
Точка в полярной системе координат.Каждая точка в полярной системе координат может быть определена двумя полярными координатами, что обычно называются
(радиальная координата) и (угловая координата, полярный угол, азимут, иногда пишут  или
или  ). Координата соответствует расстоянию до полюса, а координата равна углу в направлении против часовой стрелки от луча через 0° (иногда называется полярной осью)[1].
). Координата соответствует расстоянию до полюса, а координата равна углу в направлении против часовой стрелки от луча через 0° (иногда называется полярной осью)[1].Например, точка с координатами
 будет выглядеть на графике как точка на луче, который лежит под углом 60° к полярной оси, на расстоянии 3 единиц от полюса. Точка с координатами
будет выглядеть на графике как точка на луче, который лежит под углом 60° к полярной оси, на расстоянии 3 единиц от полюса. Точка с координатами  будет нарисована на том же месте, поскольку отрицательное расстояние изображается в положительную в противоположном направлении (на 180°).
будет нарисована на том же месте, поскольку отрицательное расстояние изображается в положительную в противоположном направлении (на 180°).Одной из важных особенностей полярной системы координат является то, что одна и та же точка может быть представлена бесконечным количеством способов. Это происходит потому, что для определения азимута точки нужно повернуть полярную ось так, чтобы он указывал на точку. Но направление на точку не изменится, если осуществить произвольное число дополнительных полных оборотов. В общем случае точка
 может быть представлена в виде
может быть представлена в виде  или
или  , где
, где  — произвольное целое число[10].
— произвольное целое число[10].Для обозначения полюса используют координаты
 . Независимо от координаты точка с нулевым расстоянием от полюса всегда находится на нём[11]. Для получения однозначных координат точки, обычно следует ограничить значение расстояния до неотрицательных значений
. Независимо от координаты точка с нулевым расстоянием от полюса всегда находится на нём[11]. Для получения однозначных координат точки, обычно следует ограничить значение расстояния до неотрицательных значений  , а угол к интервалу
, а угол к интервалу  или
или ![(-180^\circ,\;180^\circ]](b491053c6daf8e58bfb8442d12064b55.png) (в радианах
(в радианах  или
или ![(-\pi,\;\pi]](d16c587d78a250d88360f3c2b7863ec7.png) )[12].
)[12].Углы в полярных координатах задаются либо в градусах, либо в радианах, при этом
 . Выбор, как правило, зависит от области применения. В навигации традиционно используют градусы, в то время как в некоторых разделах физики, и почти во всех разделах математики используют радианы[13].
. Выбор, как правило, зависит от области применения. В навигации традиционно используют градусы, в то время как в некоторых разделах физики, и почти во всех разделах математики используют радианы[13].Связь между декартовыми и полярными координатами
Пару полярных координат
и можно перевести в Декартовы координаты  и
и  путём применения тригонометрических функций синуса и косинуса:
путём применения тригонометрических функций синуса и косинуса:в то время как две декартовы координаты
и могут быть переведены в полярную координату : (по теореме Пифагора).
(по теореме Пифагора).
Для определения угловой координаты
следует принять во внимание два следующие соображения:- Для
 , может быть произвольным действительным числом.
, может быть произвольным действительным числом. - Для
 , чтобы получить уникальное значение , следует ограничиться интервалом в
, чтобы получить уникальное значение , следует ограничиться интервалом в  . Обычно выбирают интервал или .
. Обычно выбирают интервал или .
Для вычисления
в интервале , можно воспользоваться такими уравнениями ( обозначает обратную функцию к тангенсу):
обозначает обратную функцию к тангенсу):Для вычисления
в интервале , можно воспользоваться такими уравнениями:[14]Учитывая, что для вычисления полярного угла не достаточно знать отношение
к , а ещё нужны знаки одного из этих чисел, многие из современных языков программирования имеют среди своих функций помимо функции atan, определяющей арктангенс числа, ещё и дополнительную функциюatan2, которая имеет отдельные аргументы для числителя и знаменателя. В языках программирования, поддерживающих необязательные аргументы (например, в Common Lisp), функцияatanможет получать значение координаты.Уравнение кривых в полярных координатах
Благодаря радиальной природе полярной системы координат, некоторые кривые могут быть достаточно просто описаны полярным уравнением, тогда как уравнение в прямоугольной системе координат были бы намного сложнее. Среди самых известных кривых: полярная роза, архимедова спираль, Лемниската, улитка Паскаля и кардиоида.
Окружность
 Круг, заданный уравнением
Круг, заданный уравнением .
.Общее уравнение окружности с центром в (
 ) и радиусом
) и радиусом  имеет вид:
имеет вид:Это уравнение может быть упрощено для частных случаев, например
является уравнением, определяющим окружность с центром в полюсе и радиусом
.[15]Прямая
Радиальные прямые (те, которые проходят через полюс) определяются уравнением
где
— угол, на который прямая отклоняется от полярной оси, то есть,  где
где  — наклон прямой в прямоугольной системе координат. Нерадиальная прямая, перпендикулярно пересекает радиальную прямую
— наклон прямой в прямоугольной системе координат. Нерадиальная прямая, перпендикулярно пересекает радиальную прямую  в точке
в точке  определяется уравнением
определяется уравнениемПолярная роза
 Полярная роза задана уравнением
Полярная роза задана уравнением .
.Полярная роза — известная математическая кривая, похожая на цветок с лепестками. Она может быть определена простым уравнением в полярных координатах:
для произвольной постоянной
 (включая 0). Если
(включая 0). Если  — целое число, то это уравнение будет определять розу с лепестками для нечётных , либо с
— целое число, то это уравнение будет определять розу с лепестками для нечётных , либо с  лепестками для чётных . Если — рациональное, но не целое, график, заданный уравнением, образует фигуру, подобную розе, но лепестки будут перекрываться. Розы с 2, 6, 10, 14 и т. д. лепестками этим уравнением определить невозможно. Переменная определяет длину лепестков.
лепестками для чётных . Если — рациональное, но не целое, график, заданный уравнением, образует фигуру, подобную розе, но лепестки будут перекрываться. Розы с 2, 6, 10, 14 и т. д. лепестками этим уравнением определить невозможно. Переменная определяет длину лепестков.Если считать, что радиус не может быть отрицательным, то при любом натуральном
мы будем иметь - лепестковую розу. Таким образом, уравнение  будет определять розу с двумя лепестками. С геометрической точки зрения радиус - это расстояние от полюса до точки и он не может быть отрицательным.
будет определять розу с двумя лепестками. С геометрической точки зрения радиус - это расстояние от полюса до точки и он не может быть отрицательным.Спираль Архимеда
 Одна из ветвей спирали Архимеда, задаваемая уравнением
Одна из ветвей спирали Архимеда, задаваемая уравнением для
для  .
.Архимедова спираль названа в честь её изобретателя, древнегреческого математика Архимеда. Эту спираль можно определить с помощью простого полярного уравнения:
Изменения параметра
приводят к повороту спирали, а параметра  — расстояния между витками, которое является константой для конкретной спирали. Спираль Архимеда имеет две ветви, одну для
— расстояния между витками, которое является константой для конкретной спирали. Спираль Архимеда имеет две ветви, одну для  а другую для
а другую для  . Две ветви плавно соединяются в полюсе. Зеркальное отображение одной ветви относительно прямой, проходящей через угол 90°/270°, даст другую ветвь. Эта кривая интересна тем, что была описана в математической литературе одной из первых, после конического сечения, и лучше других определяется именно полярным уравнением.
. Две ветви плавно соединяются в полюсе. Зеркальное отображение одной ветви относительно прямой, проходящей через угол 90°/270°, даст другую ветвь. Эта кривая интересна тем, что была описана в математической литературе одной из первых, после конического сечения, и лучше других определяется именно полярным уравнением.Конические сечения
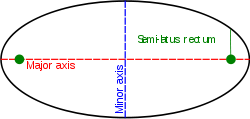 Эллипс.
Эллипс.Коническое сечение, один из полюсов которого находится в полюсе, а другой где-то на полярной оси (так, что малая полуось лежит вдоль полярной оси) задаётся уравнением:
где
 — эксцентриситет, а
— эксцентриситет, а  — фокальный параметр. Если
— фокальный параметр. Если  , это уравнение определяет гиперболу; если
, это уравнение определяет гиперболу; если  , то параболу; если
, то параболу; если  , то эллипс. Отдельным случаем является
, то эллипс. Отдельным случаем является  , определяющее окружность с радиусом .
, определяющее окружность с радиусом .Комплексные числа
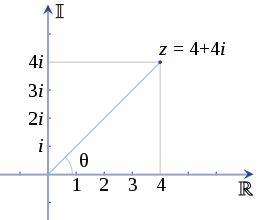 Пример комплексного числа
Пример комплексного числа , нанесённого на комплексную плоскость.
, нанесённого на комплексную плоскость. Пример комплексного числа, нанесённого на график, с использованием формулы Эйлера.
Пример комплексного числа, нанесённого на график, с использованием формулы Эйлера.Каждое комплексное число может быть представлено точкой на комплексной плоскости, и, соответственно, эта точка может определяться в декартовых координатах (прямоугольная или декартова форма), либо в полярных координатах (полярная форма). Комплексное число
 может быть записано в прямоугольной форме так:
может быть записано в прямоугольной форме так:где
 — мнимая единица, или в полярной (см. формулы преобразования между системами координат выше):
— мнимая единица, или в полярной (см. формулы преобразования между системами координат выше):и отсюда:
где
— число Эйлера. Благодаря формуле Эйлера, оба представления эквивалентны[16] (Следует отметить, что в этой формуле, подобно остальным формулам, содержащим возведения в степень углов, угол задан в радианах)Для перехода между прямоугольным и полярным представлением комплексных чисел, могут использоваться указанные выше формулы преобразования между системами координат.
Операции умножения, деления и возведения в степень с комплексными числами, как правило, проще проводить в полярной форме. Согласно правилам возведения в степень:
- Умножение:
- Деление:
- Возведение в степень (формула Муавра):
В математическом анализе
Операции математического анализа тоже можно сформулировать, используя полярные координаты[17][18].
Дифференциальное исчисление
Справедливы следующие формулы:
Чтобы найти тангенс угла наклона касательной к любой данной точке полярной кривой
 в декартовых координатах, выразим их через систему уравнений в параметрическом виде:
в декартовых координатах, выразим их через систему уравнений в параметрическом виде:Дифференцируя оба уравнения по
получим:Разделив эти уравнения (второе на первое), получим искомый тангенс угла наклона касательной в декартовой системе координат в точке
 :
:Интегральное исчисление
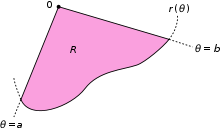 Область
Область , которая образована полярной кривой
, которая образована полярной кривой  и лучами
и лучами  и
и  .
.Пусть
 — область, которую образуют полярная кривая и лучи
— область, которую образуют полярная кривая и лучи  и
и  , где
, где  . Тогда площадь этой области находится определённым интегралом:
. Тогда площадь этой области находится определённым интегралом: Область образована из секторов (тут
Область образована из секторов (тут  ).
).Такой результат можно получить следующим образом. Сначала разобьём интервал
![[a,\;b]](186c5c676bac5b18c4105688c2eb69d2.png) на произвольное число подынтервалов . Таким образом, длина такого подынтервала
на произвольное число подынтервалов . Таким образом, длина такого подынтервала  равна
равна  (полная длина интервала), разделённая на (число подынтервалов). Пусть для каждого подынтервала
(полная длина интервала), разделённая на (число подынтервалов). Пусть для каждого подынтервала 
 — средняя точка. Построим секторы с центром в полюсе, радиусами
— средняя точка. Построим секторы с центром в полюсе, радиусами  , центральными углами и длиной дуги
, центральными углами и длиной дуги  . Поэтому площадь каждого такого сектора будет
. Поэтому площадь каждого такого сектора будет  . Отсюда, полная площадь всех секторов:
. Отсюда, полная площадь всех секторов:Если число подынтервалов
увеличивать, то погрешность такого приближенного выражения будет уменьшаться. Положив  , полученная сумма станет интегральной. Предел этой суммы при
, полученная сумма станет интегральной. Предел этой суммы при  определяет вышеописанный интеграл:
определяет вышеописанный интеграл:Обобщение
Используя декартовы координаты, площадь бесконечно малого элемента может быть вычислена как
 . При переходе к другой системе координат в многократных интегралах, необходимо использовать определитель Якоби:
. При переходе к другой системе координат в многократных интегралах, необходимо использовать определитель Якоби:Для полярной системы координат, определитель матрицы Якоби равен
:Следовательно, площадь элемента в полярных координатах можно записать так:
Теперь, функция, записанная в полярных координатах, может быть интегрирована следующим образом:
Здесь область
, как и в предыдущем разделе, такая, которую образуют полярная кривая и лучи и .Формула для вычисления площади, описанная в предыдущем разделе, получена в случае
 . Интересным результатом применения формулы для многократных интегралов является Интеграл Эйлера — Пуассона:
. Интересным результатом применения формулы для многократных интегралов является Интеграл Эйлера — Пуассона:Векторный анализ
Для полярных координат можно применить элементы векторного анализа. Любое векторное поле
 можно записать в полярной системе координат, используя единичные векторы:
можно записать в полярной системе координат, используя единичные векторы:в направлении
 , и
, иСвязь между декартовыми компонентами поля
 и
и  и его компонентами в полярной системе координат задаётся уравнениями:
и его компонентами в полярной системе координат задаётся уравнениями:Соответствующим образом в полярной системе координат определяются операторы векторного анализа. Например, градиент скалярного поля
 записывается:
записывается:Трёхмерное расширение
Полярная система координат распространяется в третье измерение двумя системами: цилиндрической и сферической, обе содержат двумерную полярную систему координат как подмножество. По сути, цилиндрическая система расширяет полярную добавлением ещё одной координаты расстояния, а сферическая — ещё одной угловой координаты.
Цилиндрические координаты
 Точка
Точка начертана в цилиндрической системе координат.
начертана в цилиндрической системе координат.Цилиндрическая система координат, грубо говоря, расширяет плоскую полярную систему добавлением третьей линейной координаты, называемой «высотой» и равной высоте точки над нулевой плоскостью подобно тому, как Декартова система расширяется на случай трёх измерений. Третья координата обычно обозначается как
, образуя тройку координат  .
.Тройку цилиндрических координат можно перевести в декартову систему следующими преобразованиями:
Сферические координаты
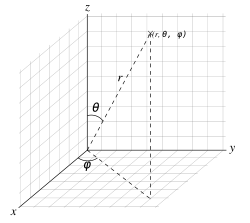 Точка начертана в сферической системе координат.
Точка начертана в сферической системе координат.Также полярные координаты можно расширить на случай трёх измерений путём добавления угловой координаты
, равным углу поворота от вертикальной оси (называется зенитом или широтой, значения находятся в интервале от 0 до 180°). То есть, сферические координаты, это тройка  , где — расстояние от центра координат, — угол от оси (как и в плоских полярных координатах), — широта. Сферическая система координат подобна географической системе координат для определения места на поверхности Земли, где начало координат совпадает с центром Земли, широта
, где — расстояние от центра координат, — угол от оси (как и в плоских полярных координатах), — широта. Сферическая система координат подобна географической системе координат для определения места на поверхности Земли, где начало координат совпадает с центром Земли, широта  является дополнением и равна
является дополнением и равна  , а долгота
, а долгота  вычисляется по формуле
вычисляется по формуле  [19].
[19].Тройку сферических координат можно перевести в декартову систему следующими преобразованиями:
Обобщение на n измерений
Полярную систему координат можно расширить на случай
-мерного пространства. Пусть  ,
,  — координатные векторы -мерной прямоугольной системе координат. Необходимые координаты в -мерный полярной системе можно вводить как угол отклонения вектора
— координатные векторы -мерной прямоугольной системе координат. Необходимые координаты в -мерный полярной системе можно вводить как угол отклонения вектора  от координатной оси
от координатной оси  .
.Для перевода обобщённых
-мерных полярных координат в декартовы можно воспользоваться следующими формулами:Как можно показать, случай
 соответствует обычной полярной системе координат на плоскости, а
соответствует обычной полярной системе координат на плоскости, а  — обычной сферической системе координат.
— обычной сферической системе координат.Якобиан преобразования полярных координат в декартовы имеет вид:
где
-мерный элемент объёма иметь вид:Применение
Полярная система координат двумерная и поэтому может применяться только в тех случаях, когда местонахождение точки определяется на плоскости, или для случая однородности свойств системы в третьем измерении, например, при рассмотрении течения в круглой трубе. Лучшим контекстом применения полярных координат являются случаи, тесно связанные с направлением и расстоянием от некоторого центра. Например, в приведённых выше примерах видно, что простых уравнений в полярных координатах достаточно для определения таких кривых как спираль Архимеда, уравнения которых в прямоугольной системе координат гораздо сложнее. Кроме того, многие физических системы — такие, которые содержат тела, движущиеся вокруг центра, либо явления, распространяющиеся из некоторого центра — гораздо проще моделировать в полярных координатах. Причиной создания полярной системы координат было исследование орбитального и движения по кругу.
Позиционирование и навигация
Полярную систему координат часто применяют в навигации, поскольку пункт назначения можно задать как расстояние и направление движения от отправной точки. Например, в авиации, для навигации применяют несколько изменённую версию полярных координат. В этой системе, обычно используемой для навигации, луч 0° называют направлением 360, а углы отсчитываются в направлении по часовой стрелке. Направление 360 соответствует магнитному северу, а направления 90, 180, и 270 соответствуют магнитным востоку, югу и западу[20]. Так, самолёт, летящий 5 морских миль на восток можно описать как самолёт, летящий 5 единиц в направлении 90 (центр управления полётами назовёт его найн-зиро)[21].
Моделирование
 Фронт мощности звуковой волны промышленного громкоговорителя показан в сферических полярных координатах при шести частотах.
Фронт мощности звуковой волны промышленного громкоговорителя показан в сферических полярных координатах при шести частотах.Системы с радиальной симметрией очень хорошо подходят для описания в радиальных координатах, где полюс системы координат совпадает с центром симметрии. В качестве примера можно привести уравнение тока грунтовых вод в случае радиально симметричных колодцев. Системы с центральными силами также подходят для моделирования в полярных координатах. К таким системам относятся гравитационные поля, подчиняющиеся закону обратно-квадратичной зависимости, так и системы с точечными источниками энергии, такие как радиоантенны.
Трёхмерное моделирование звука динамиков может использоваться для прогнозирования их эффективности. Необходимо сделать несколько диаграмм в полярных координатах для широкого диапазона частот, поскольку фронт существенно меняется в зависимости от частоты звука. Полярные диаграммы помогают увидеть, что многие громкоговорители с понижением частоты звука теряют направленность.
В полярных координатах также принято представлять характеристику направленности микрофонов, определяемая отношением чувствительности
 при падении звуковой волны под углом
при падении звуковой волны под углом  относительно акустической оси микрофона к его осевой чувствительности:
относительно акустической оси микрофона к его осевой чувствительности:См. также
- Системы координат в элементарной математике
- Системы координат
Примечания
- ↑ 1 2 Brown Richard G. Advanced Mathematics: Precalculus with Discrete Mathematics and Data Analysis / Andrew M. Gleason. — Evanston, Illinois: McDougal Littell, 1997. — ISBN 0-395-77114-5
- ↑ Friendly, Michael Milestones in the History of Thematic Cartography, Statistical Graphics, and Data Visualization.(недоступная ссылка — история) Проверено 10 сентября 2006.
- ↑ T. Koetsier, L. Bergmans (2005), «Mathematics and the Divine», Elsevier, с. 169, ISBN 0444503285
- ↑ Шаблон:MacTutor
- ↑ David A. King (1996), «Astronomy and Islamic society: Qibla, gnomics and timekeeping», in Roshdi Rashed (ed.), Encyclopedia of the History of Arabic Science, Vol. 1, pp. 128—184 [153], Routledge, London and New York
- ↑ 1 2 Coolidge, Julian (1952). «The Origin of Polar Coordinates». American Mathematical Monthly 59: 78–85. DOI:10.2307/2307104.
- ↑ Boyer, C. B. (1949). «Newton as an Originator of Polar Coordinates». American Mathematical Monthly 56: 73—78. DOI:10.2307/2306162.
- ↑ Miller, Jeff Earliest Known Uses of Some of the Words of Mathematics. Архивировано из первоисточника 15 февраля 2012. Проверено 10 сентября 2006.
- ↑ Smith David Eugene History of Mathematics, Vol II. — Boston: Ginn and Co., 1925. — P. 324.
- ↑ Polar Coordinates and Graphing (PDF) (2006-04-13). Архивировано из первоисточника 15 февраля 2012. Проверено 22 сентября 2006.
- ↑ Lee Theodore Precalculus: With Unit-Circle Trigonometry. — Fourth Edition. — Thomson Brooks/Cole, 2005. — ISBN 0534402305
- ↑ Stewart Ian Complex Analysis (the Hitchhiker's Guide to the Plane). — Cambridge University Press, 1983. — ISBN 0521287634
- ↑ Serway Raymond A. Principles of Physics. — Brooks/Cole—Thomson Learning, 2005. — ISBN 0-534-49143-X
- ↑ Torrence Bruce Follett The Student's Introduction to Mathematica®. — Cambridge University Press, 1999. — ISBN 0521594618
- ↑ Claeys, Johan Polar coordinates. Архивировано из первоисточника 15 февраля 2012. Проверено 25 мая 2006.
- ↑ Smith Julius O. Euler's Identity // Mathematics of the Discrete Fourier Transform (DFT). — W3K Publishing, 2003. — ISBN 0-9745607-0-7
- ↑ Husch, Lawrence S. Areas Bounded by Polar Curves. Архивировано из первоисточника 15 февраля 2012. Проверено 25 ноября 2006.
- ↑ Lawrence S. Husch Tangent Lines to Polar Graphs. Архивировано из первоисточника 15 февраля 2012. Проверено 25 ноября 2006.
- ↑ Wattenberg, Frank Spherical Coordinates (1997). Архивировано из первоисточника 15 февраля 2012. Проверено 16 сентября 2006.
- ↑ Santhi, Sumrit Aircraft Navigation System. Архивировано из первоисточника 15 февраля 2012. Проверено 26 ноября 2006.
- ↑ Emergency Procedures (PDF). Архивировано из первоисточника 15 февраля 2012. Проверено 15 января 2007.
Литература
- Гельфанд И. М., Глаголева Е. Г., Кириллов А. А. Метод координат. Издание пятое, стереотипное. Серия: Библиотечка физико-математической школы. Математика. Выпуск 1. М.: Наука, 1973, стр. 47-50.
Ссылки
- Программы для рисования графиков в каталоге ссылок Open Directory Project (dmoz).
Категории:- Системы координат

































![\frac{1}{2}\int\limits_a^b[r(\varphi)]^2\,d\varphi.](e2a9b1a024087884450a4732ff961266.png)


![\lim_{\Delta\varphi\to 0}\sum_{i=1}^\infty\frac{1}{2}r(\varphi_i)^2\,\Delta\varphi=\frac{1}{2}\int\limits_a^b[r(\varphi)]^2\,d\varphi.](893d37d10b9225ea24251f52597c0bed.png)





















Wikimedia Foundation. 2010.