- Прямоугольная система координат
-
Прямоугольная система координат — прямолинейная система координат с взаимно перпендикулярными осями на плоскости или в пространстве. Наиболее простая и поэтому часто используемая система координат. Очень легко и прямо обобщается для пространств любой размерности, что также способствует ее широкому применению.
Связанные термины: Декартовой обычно называют прямоугольную систему координат с одинаковыми масштабами по осям, а общей Декартовой системой координат называют аффинную систему координат (не прямоугольную)[1].
Содержание
Прямоугольная система координат на плоскости
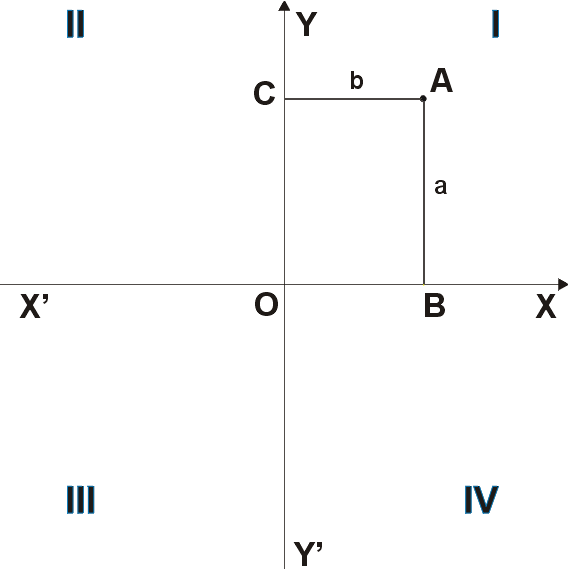
Прямоугольная система координат на плоскости образуется двумя взаимно перпендикулярными осями координат
 и
и  . Оси координат пересекаются в точке
. Оси координат пересекаются в точке  , которая называется началом координат, на каждой оси выбрано положительное направление.
, которая называется началом координат, на каждой оси выбрано положительное направление.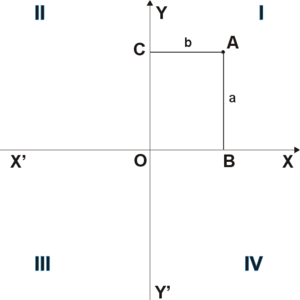 Рис. 1
Рис. 1
Положение точки
 на плоскости определяется двумя координатами
на плоскости определяется двумя координатами  и
и  . Координата равна длине отрезка
. Координата равна длине отрезка  , координата — длине отрезка
, координата — длине отрезка  в выбранных единицах измерения. Отрезки и определяются линиями, проведёнными из точки параллельно осям и соответственно.
в выбранных единицах измерения. Отрезки и определяются линиями, проведёнными из точки параллельно осям и соответственно.При этом координате
приписывается знак минус, если точка  лежит на луче
лежит на луче  (а не на луче
(а не на луче  , как на рисунке). Координате приписывается знак минус, если точка
, как на рисунке). Координате приписывается знак минус, если точка  лежит на луче
лежит на луче  . Таким образом, и являются отрицательными направлениями осей координат (каждая ось координат рассматривается как числовая ось).
. Таким образом, и являются отрицательными направлениями осей координат (каждая ось координат рассматривается как числовая ось).Координата
называется абсциссой точки , координата — ординатой точки .
Символически это записывают так:или
или указывают принадлежность координат конкретной точке с помощью индекса:
итд.
- В правосторонней системе координат положительное направление осей выбирают так, чтобы при направлении оси вверх, ось смотрела направо. Обычно принято пользоваться правосторонними системами координат (если обратное не оговорено или не очевидно - например, из чертежа; иногда по каким-то соображениям бывает удобнее всё же пользоваться левосторонней системой координат).
- Четыре угла (I, II, III, IV), образованные осями координат и , называются координатными углами или квадрантами (см. рис. 1).
- Если точка лежит в координатном углу I, то точка имеет положительные абсциссу и ординату. Если точка лежит в координатном углу II, то точка имеет отрицательную абсциссу и положительную ординату. Если точка лежит в координатном углу III, то точка имеет отрицательные абсциссу и ординату. Если точка лежит в координатном углу IV, то точка имеет положительную абсциссу и отрицательную ординату.
Прямоугольная система координат в пространстве
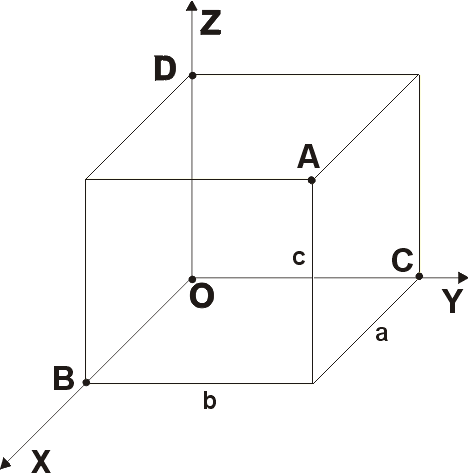
Прямоугольная система координат в пространстве (в этом параграфе имеется в виду трехмерное пространство, о более многомерных пространствах — см. ниже) образуется тремя взаимно перпендикулярными осями координат
,  и
и  . Оси координат пересекаются в точке , которая называется началом координат, на каждой оси выбрано положительное направление, указанное стрелками, и единица измерения отрезков на осях. Единицы измерения обычно (не обязательно[2]) одинаковы для всех осей. — ось абсцисс, — ось ординат, — ось аппликат.
. Оси координат пересекаются в точке , которая называется началом координат, на каждой оси выбрано положительное направление, указанное стрелками, и единица измерения отрезков на осях. Единицы измерения обычно (не обязательно[2]) одинаковы для всех осей. — ось абсцисс, — ось ординат, — ось аппликат.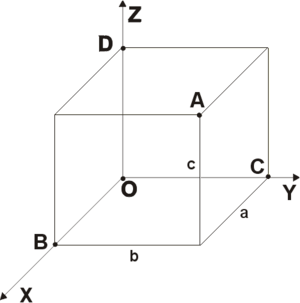 Рис. 2
Рис. 2Положение точки
в пространстве определяется тремя координатами , и  . Координата равна длине отрезка , координата — длине отрезка , координата — длине отрезка
. Координата равна длине отрезка , координата — длине отрезка , координата — длине отрезка  в выбранных единицах измерения. Отрезки , и определяются плоскостями, проведёнными из точки параллельно плоскостям
в выбранных единицах измерения. Отрезки , и определяются плоскостями, проведёнными из точки параллельно плоскостям  ,
,  и
и  соответственно.
соответственно.- Координата называется абсциссой точки ,
- координата — ординатой точки ,
- координата — аппликатой точки .
Символически это записывают так:
или
или привязывают запись координат к конкретной точке с помощью индекса:
и т. п.
Каждая ось рассматривается как числовая прямая, т. е. имеет положительное направление, а точкам, лежащим на отрицательном луче приписываются отрицательные значения координаты (расстояние берется со знаком минус). То есть, если бы, например, точка
лежала не как на рисунке — на луче , а на его продолжении в обратную сторону от точки (на отрицательной части оси ), то абсцисса точки была бы отрицательной (минус расстоянию ). Аналогично и для двух других осей.Прямоугольные все системы координат в трехмерном пространстве делятся на два класса — правые (также используются термины положительные, стандартные) и левые. Обычно по умолчанию стараются использовать правые координатные системы, а при их графическом изображении еще и располагать их если можно, в одном из нескольких обычных (традиционных) положений. (На рис. 2 изображена правая координатная система). Правую и левую системы координат невозможно поворотами[3] совместить так, чтобы совпали соответствующие оси (и их направления). Определить, к какому классу относится какая-либо конкретно взятая система координат можно используя правило правой руки, правило винта итп (положительное направление осей выбирают так, чтобы при повороте оси
против часовой стрелки на 90° её положительное направление совпало с положительным направлением оси , если этот поворот наблюдать со стороны положительного направления оси ).Прямоугольная система координат в многомерном пространстве
Прямоугольная система координат может быть использована и в пространстве любой конечной размерности аналогично тому, как это делается для трехмерного пространства. Количество координатных осей при этом равно размерности пространства (в этом параграфе будем обозначать ее n).
Для обозначения координат обычно[4] применяют не разные буквы, а одну и ту же букву с числовым индексом. Чаще всего это:
Для обозначения произвольной i-ой координаты из этого набора используют буквенный индекс:
а нередко обозначение
 используют и для обозначения всего набора, подразумевая, что индекс пробегает весь набор значений:
используют и для обозначения всего набора, подразумевая, что индекс пробегает весь набор значений:  .
.В любой размерности пространства прямоугольные координатные системы делятся на два класса, правые и левые (или положительные и отрицательные). Для многомерных пространств какая-то одна из координатных систем произвольно (условно) называют правой, а остальные оказываются правыми или левыми в зависимости от того, той же они ориентации или нет[5].
Прямоугольные координаты вектора
Для определения прямоугольных координат вектора (применимых для представления векторов любой размерности) можно исходить из того, что координаты вектора (направленного отрезка), начало которого находится в начале координат, совпадают с координатами его конца[6].
- Таким образом, например, координаты (x,y) на рис.1 являются координатами вектора
 .
.
Для векторов (направленных отрезков), начало которых не совпадает с началом координат, прямоугольные координаты можно определить одним из двух способов:
1. Вектор можно перенести так, чтобы его начало совпало с началом координат). Тогда его координаты определяются способом, описанным в начале параграфа: координаты вектора, перенесенного так, что его начало совпадает с началом координат, - это координаты его конца.
2. Вместо этого можно просто вычесть из координат конца вектора (направленного отрезка) координаты его начала.
- Для прямоугольных координат понятие координаты вектора совпадает с понятием ортогональной проекции вектора на направление соответствующей координатной оси.
В прямоугольных координатах очень просто записываются все операции над векторами:
- Сложение и умножение на скаляр:
или
или
-
- а отсюда и вычитание и деление:
или
или
(Это верно для любой размерности n и даже, наравне с прямоугольными, для косоугольных координат).
или
(Только в прямоугольных координатах с единичным масштабом по всем осям).
- Через скалярное произведение - длину вычисление длины вектора
-

- и угла между векторами

для любой размерности пространства,
- Векторное умножение (только для трехмерного же пространства, на котором оно и определено):
Очевидно, всё это позволяет, если надо, свести все операции над векторами к достаточно простым операциям над числами.
Орты
Прямоугольная система координат[7] (любой размерности) также описывается[8] набором ортов, сонаправленных с осями координат. Количество ортов равно размерности системы координат и все они перпендикулярны друг другу. Такие орты составляют базис, притом ортонормированный[9].
В трёхмерном случае такие орты обычно обозначаются
 ,
,  и
и 
или
 ,
,  и
и  .
.
Могут также применяться обозначения со стрелками (
 ,
,  и
и  или
или  ,
,  и
и  ) или другие в соответствии с обычным способом обозначения векторов в той или иной литературе.
) или другие в соответствии с обычным способом обозначения векторов в той или иной литературе.При этом в случае правой системы координат действительны следующие формулы с векторными произведениями ортов:
Для более высоких, чем 3, размерностей (или для общего случая, когда размерность может быть любой) обычно для ортов применяют вместо этого обозначения с числовыми индексами, достаточно часто[10] это
где n - размерность пространства.
Вектор любой размерности раскладывается по базису (координаты служат коэффициентами разложения):
или
а для ортонормированного базиса координаты еще и очень легко найти через скалярные произведения с ортами:
История
Впервые прямоугольную систему координат ввел Рене Декарт в своей работе «Рассуждение о методе» в 1637 году. Поэтому прямоугольную систему координат называют также — Декартова система координат. Координатный метод описания геометрических объектов положил начало аналитической геометрии. Вклад в развитие координатного метода внес также Пьер Ферма, однако его работы были впервые опубликованы уже после его смерти. Декарт и Ферма применяли координатный метод только на плоскости.
Координатный метод для трёхмерного пространства впервые применил Леонард Эйлер уже в XVIII веке.
Использование ортов восходит, по-видимому, к Гамильтону и Максвеллу.
См. также
Примечания
- ↑ http://dic.academic.ru/dic.nsf/bse/83196/Декартова Большая Советская Энциклопедия. Сам же Р. Декарт в «Геометрии» (1637) употреблял только систему координат на плоскости ( и, вообще, косоугольную).
- ↑ Иногда это просто принципиально невозможно, если по осям откладываются величины разной физической размерности; впрочем, с геометрической точки зрения это замечание не слишком существенно, т.к. можно тогда считать масштабы по осям равными условно (например масштабы так, чтобы единицы совпадали при изображая на геометрической плоскости).
- ↑ Можно превратить правую координатную систему в левую и наоборот с помощью зеркального отражения.
- ↑ Но не обязательно, вопрос обозначений в конечном итоге определяется конкретным приложением.
- ↑ Это можно выяснить, исходя из того, можно ли какими-то вращениями (и переносами, если не совпадают начала координат) совместить данную координатную систему с той, ориентация которого правая по определению. Если да, то данная система считается правой, если нет, то левой. Еще проще технически это выяснить через знак определителя матрицы преобразования от правого базиса к данному.
- ↑ Конец направленного отрезка — точка; прямоугольные координаты точки рассмотрены в статье выше.
- ↑ В этом параграфе будем подразумевать обычную декартову систему координат, то есть прямоугольную систему координат с одинаковым масштабом по всем осям; рассмотрение систем координат с разным масштабом по разным осям внесло бы здесь неоправданные формальные усложнения при довольно малом выигрыше содержательном отношении.
- ↑ Это описание очевидно полностью эквивалентно обычному заданию осей координат, надо только еще задать начало координат (последнее нередко очевидно по умолчанию).
- ↑ При отказе от условия равномасштабности координатных осей — просто ортогональный базис.
- ↑ Впрочем, вместо буквы e нередко могут быть использованы и другие буквы. Как правило, это явно оговорено.
Ссылки
- В. И. Гервидс Модель декартовой системы координат (flash). НИЯУ МИФИ (10.03.2011). Проверено 3 мая 2011.
Категории:- Аналитическая геометрия
- Системы координат
- Появились в 1637 году





















![[\mathbf{i}\,,\mathbf{j}]=\mathbf{k};](3a843604aa636a377e9554eb188ea14a.png)
![[\mathbf{j}\,,\mathbf{k}]=\mathbf{i};](50bd5c9ccb7363843281795ae920cffe.png)
![[\mathbf{k}\,,\mathbf{i}]=\mathbf{j}.](9f42ab9bfdbcc08fdaabb762d7439b5f.png)




 -мерные координаты
-мерные координатыWikimedia Foundation. 2010.