- Система координат
-
Система координат — комплекс определений, реализующий метод координат, то есть способ определять положение точки или тела с помощью чисел или других символов. Совокупность чисел, определяющих положение конкретной точки, называется координатами этой точки.
В математике координаты — совокупность чисел, сопоставленных точкам многообразия в некоторой карте определённого атласа.
В элементарной геометрии координаты — величины, определяющие положение точки на плоскости и в пространстве. На плоскости положение точки чаще всего определяется расстояниями от двух прямых (координатных осей), пересекающихся в одной точке (начале координат) под прямым углом; одна из координат называется ординатой, а другая — абсциссой. В пространстве по системе Декарта положение точки определяется расстояниями от трёх плоскостей координат, пересекающихся в одной точке под прямыми углами друг к другу, или сферическими координатами, где начало координат находится в центре сферы.
В географии координаты — широта, долгота и высота над известным общим уровнем (например, океана). См. географические координаты.
В астрономии координаты — величины, при помощи которых определяется положение звезды, например, прямое восхождение и склонение.
Небесные координаты — числа, с помощью которых определяют положение светил и вспомогательных точек на небесной сфере. В астрономии употребляют различные системы небесных координат. Каждая из них по существу представляет собой систему полярных координат на сфере с соответствующим образом выбранным полюсом. Систему небесных координат задают большим кругом небесной сферы (или его полюсом, отстоящим на 90° от любой точки этого круга) с указанием на нём начальной точки отсчёта одной из координат. В зависимости от выбора этого круга системы небесных координат называлась горизонтальной, экваториальной, эклиптической и галактической.
Наиболее используемая система координат — прямоугольная система координат (также известная как декартова система координат).
Координаты на плоскости и в пространстве можно вводить бесконечным числом разных способов. Решая ту или иную математическую или физическую задачу методом координат, можно использовать различные координатные системы, выбирая ту из них, в которой задача решается проще или удобнее в данном конкретном случае. Известным обобщением системы координат являются системы отсчёта и системы референции.
Содержание
Список наиболее распространённых систем координат
- Аффинная (косоугольная) система координат
- Барицентрические координаты
- Биангулярные координаты
- Биполярные координаты
- Бицентрические координаты
- Бицилиндрические координаты
- Конические координаты
- Координаты Риндлера — в пространстве Минковского
- Параболические координаты
- Полярная система координат
- Проективные координаты
- Прямоугольная (Декартова) система координат
- Сферическая система координат
- Тороидальная система координат
- Трилинейные координаты
- Цилиндрическая система координат
- Цилиндрические параболические координаты
- Эллипсоидальные координаты (эллиптические координаты)
Основные системы
В этом разделе даются разъяснения к наиболее употребляемым системам координат в элементарной математике.
Декартовы координаты
Расположение точки P на плоскости определяется декартовыми координатами с помощью пары чисел
 :
: — расстояние от точки P до оси y с учетом знака
— расстояние от точки P до оси y с учетом знака — расстояние от точки P до оси x с учетом знака
— расстояние от точки P до оси x с учетом знака
В пространстве же необходимо уже 3 координаты
 :
:- — расстояние от точки P до плоскости yz
- — расстояние от точки P до плоскости xz
 — расстояние от точки P до плоскости xy
— расстояние от точки P до плоскости xy
Полярные координаты
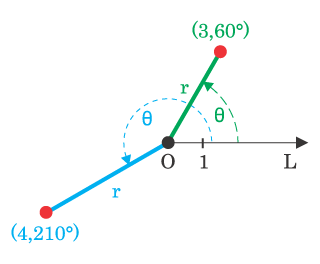
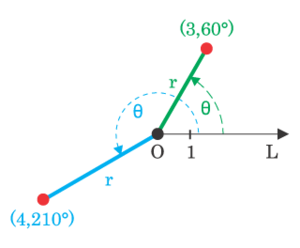 Полярные координаты.
Полярные координаты.
В полярной системе координат положение точки определяется расстояние до центра координат и углом радиус-вектора с осью Ox.
Термин «полярные координаты» используется только на плоскости, в пространстве применяются цилиндрические и сферические системы координат.
Цилиндрические координаты
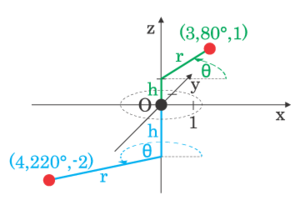 Цилиндрические координаты.
Цилиндрические координаты.Цилиндрические координаты — трехмерный аналог полярных, в котором точка P представляется трехкомпонентным кортежем
 . В терминах декартовой системы координат,
. В терминах декартовой системы координат, (радиус) — расстояние от оси z к точке P,
(радиус) — расстояние от оси z к точке P, (азимут или долгота) — угол между положительной («плюсовой») частью оси x и прямой линии, мысленно проведённой от полюса до точки P, спроектирован на xy-плоскость
(азимут или долгота) — угол между положительной («плюсовой») частью оси x и прямой линии, мысленно проведённой от полюса до точки P, спроектирован на xy-плоскость (высота) — расстояние (с учетом знака) от xy-плоскости до точки P.
(высота) — расстояние (с учетом знака) от xy-плоскости до точки P.
- Примечание: в литературе можно встретить пометку z для h; это не принципиально, но нужно следить, какие отметки применяются.
Полярные координаты имеют один недостаток: значение θ теряет смысл, если r = 0.
Цилиндрические координаты полезны для изучения систем, симметричных вокруг некой оси. Например, длинный цилиндр в декартовых координатах имеет уравнение
 , тогда как в цилиндрических оно выглядит как r = c
, тогда как в цилиндрических оно выглядит как r = cСферические координаты
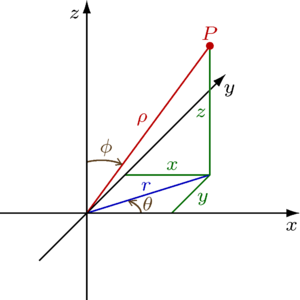 Сферические координаты.
Сферические координаты.Сферические координаты — трехмерный аналог полярных
Обозначения, принятые в Америке
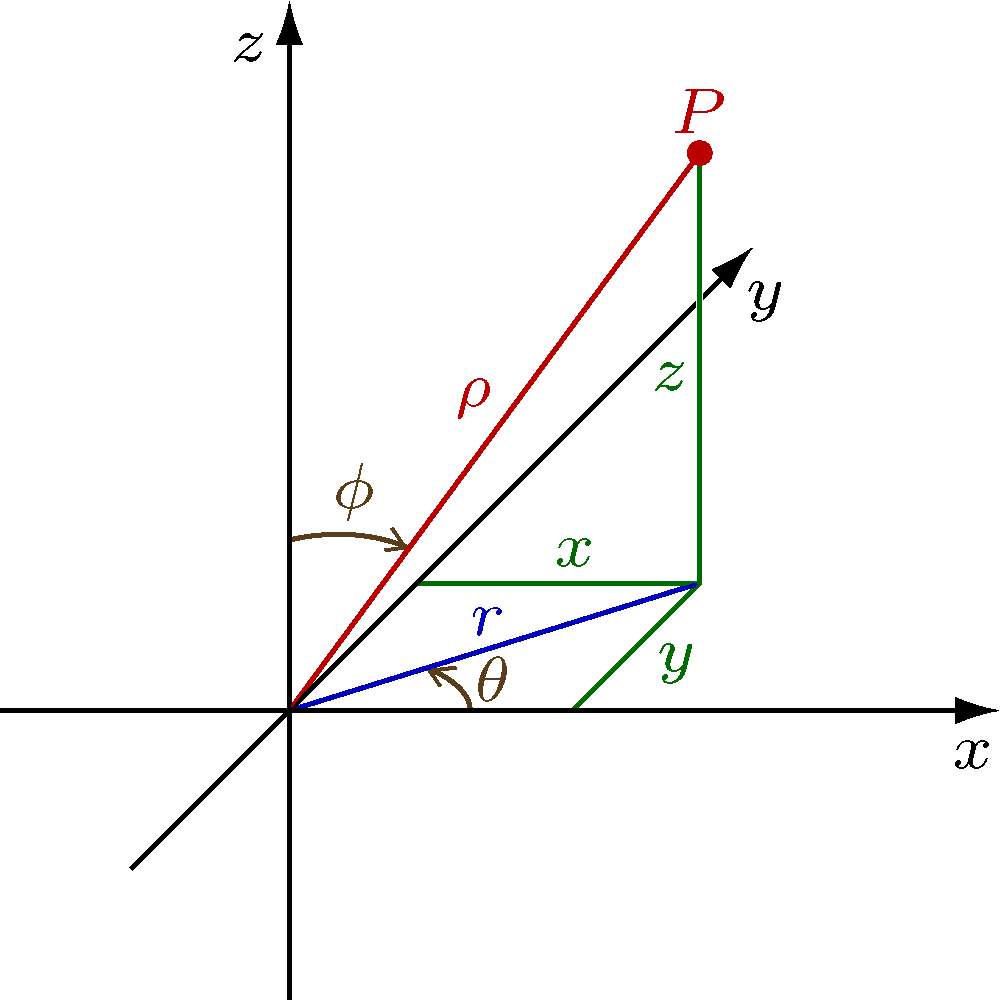
В сферической системе координат, расположение точки P определяется тремя компонентами:
 . В терминах декартовой системы координат,
. В терминах декартовой системы координат, (радиус) — это расстояние от точки Р до полюса,
(радиус) — это расстояние от точки Р до полюса, (широта или полярный угол) — угол между z-осью и прямой, проведённой из полюса до точки P
(широта или полярный угол) — угол между z-осью и прямой, проведённой из полюса до точки P- (азимут или долгота) — угол между положительной («плюсовой» x-осью и проекцией прямой, проведённой из полюса до точки P на xy-плоскость.
- Примечание: в литературе можно встретить пометку φ или θ, а также r для ρ;
Сферическая система координат также имеет недостаток: φ теряет смысл если ρ = 0, также и θ теряет смысл, если ρ = 0 или φ = 0 или φ = 180°.
Для построения точки по её сферическими координатами, нужно: от полюса отложить отрезок, равный ρ вдоль положительной z-оси, вернуть его на угол φ вокруг оси y в направлении положительной x-оси, и вернуть на угол θ вокруг z-оси в направлении положительной y-оси.
Сферические координаты полезны при изучении систем, симметричных вокруг точки. Так, уравнение сферы в декартовых координатах выглядит как
 , тогда как в сферических становится намного проще:
, тогда как в сферических становится намного проще:  .
.Европейские обозначения
В Европе принято использовать другие обозначения. Положение точки задаётся числами:
 , Где r — расстояние от точки до начала координат,
, Где r — расстояние от точки до начала координат,  — полярный угол, который изменяется в пределах от 0 до π,
— полярный угол, который изменяется в пределах от 0 до π,  — Азимутальный угол, который изменяется в пределах от 0 до 2π. То есть, в европейской системе, которая применяется также и в России, обозначения для углов переставлены по сравнению с американской.
— Азимутальный угол, который изменяется в пределах от 0 до 2π. То есть, в европейской системе, которая применяется также и в России, обозначения для углов переставлены по сравнению с американской.Переход из одной системы координат в другую
Декартовы и полярные
где u0 — функция Хевисайда с
 , а sgn — функция signum . Здесь функции u0 и sgn используются как «логические» переключатели, аналогичные по значению операторам «если .. то» (if…else) в языках программирования. Некоторые языки программирования имеют специальную функцию atan2 (y, x), которая находит правильный θ в необходимом квадранте, определённом x и y.
, а sgn — функция signum . Здесь функции u0 и sgn используются как «логические» переключатели, аналогичные по значению операторам «если .. то» (if…else) в языках программирования. Некоторые языки программирования имеют специальную функцию atan2 (y, x), которая находит правильный θ в необходимом квадранте, определённом x и y.Декартовы и цилиндрические
Декартовы и сферические
Уравнения для американских обозначений
Цилиндрические и сферические
См. также
- Системы координат в элементарной математике
- Галилеевы координаты
- Гауссовы координаты
- Нормальные координаты
- Римановы координаты
- Начало координат, координатная ось, орт
- Локальный стандарт покоя (начало координат в астрономии)
- Главноортодромическая система координат
- Размерность пространства
Литература
- Гельфанд И. М., Глаголева Е. Г., Кириллов А. А. Метод координат. Издание пятое, стереотипное. Серия: Библиотечка физико-математической школы. Математика. Выпуск 1. М.: Наука, 1973.
Ссылки
Категории:- Системы координат
- Элементарная математика



























Wikimedia Foundation. 2010.