- Быстро-медленная система
-
 Фазовый портрет быстро-медленной системы; зеленым показана устойчивая часть медленной поверхности, красным — неустойчивая
Фазовый портрет быстро-медленной системы; зеленым показана устойчивая часть медленной поверхности, красным — неустойчивая
Быстро-медленная система в математике — это динамическая система, в которой присутствуют процессы, происходящие в разных масштабах времени. Фазовые переменные такой системы делятся на два класса: «быстрые» и «медленные» переменные. Скорость изменения «быстрых» переменных почти во всех точках фазового пространства много быстрее скорости изменения «медленных» переменных. Траектории таких систем состоят из чередующихся участков медленного «дрейфа» и быстрых «срывов». Быстро-медленные системы описывают различные физические и иные явления, в которых постепенное эволюционное накопление малых изменений со временем приводит к скачкообразному переходу системы на новый динамический режим. [1]
Синонимичные термины: сингулярно-возмущенная система, релаксационные колебания.
Содержание
Формальное определение и основные понятия
Рассмотрим семейство систем обыкновенных дифференциальных уравнений

Если f и g гладко зависят от своих аргументов, а
 — малый параметр, то говорят, что семейство, записанное таким образом, задает быстро-медленную систему. Переменная x называется быстрой переменной, y — медленной. Теория быстро-медленных систем изучает асимптотическое поведение систем такого вида при
— малый параметр, то говорят, что семейство, записанное таким образом, задает быстро-медленную систему. Переменная x называется быстрой переменной, y — медленной. Теория быстро-медленных систем изучает асимптотическое поведение систем такого вида при  .
.Медленной кривой называется множество нулей функции f:
 . При
. При  система называется «быстрой»: переменная y является неподвижным параметром. Медленная кривая состоит из неподвижных точек быстрой системы и является таким образом её инвариантным многообразием. Для малых
система называется «быстрой»: переменная y является неподвижным параметром. Медленная кривая состоит из неподвижных точек быстрой системы и является таким образом её инвариантным многообразием. Для малых  быстро-медленная система является малым возмущением быстрой: при этом вне любой фиксированной окрестности
быстро-медленная система является малым возмущением быстрой: при этом вне любой фиксированной окрестности  скорость изменения переменной
скорость изменения переменной  сколь угодно сильно превосходит скорость изменения переменной
сколь угодно сильно превосходит скорость изменения переменной  . С геометрической точки зрения это означает, что вне окрестности медленной кривой траектории системы практически параллельны оси быстрого движения . (На иллюстрациях она традиционно изображается вертикальной, см. рисунок.)
. С геометрической точки зрения это означает, что вне окрестности медленной кривой траектории системы практически параллельны оси быстрого движения . (На иллюстрациях она традиционно изображается вертикальной, см. рисунок.)Для малых
в малой окрестности участка медленной кривой, однозначно проектирующегося вдоль направления быстрого движения (то есть не имеющего складок и других особенностей проектирования) у системы сохраняется инвариантное многообразие,  -близкое к медленной кривой . Это инвариантное многообразие называется истинной медленной кривой. Его существование можно вывести из теоремы Феничеля, или из теории центральных многообразий. Оно задается неединственным образом, но все такие инвариантные многообразия экспоненциально близки (то есть расстояние между ними оценивается как
-близкое к медленной кривой . Это инвариантное многообразие называется истинной медленной кривой. Его существование можно вывести из теоремы Феничеля, или из теории центральных многообразий. Оно задается неединственным образом, но все такие инвариантные многообразия экспоненциально близки (то есть расстояние между ними оценивается как  ).
).Проекция векторного поля быстрой системы вдоль направления быстрого движения на медленную кривую называется медленным полем, а задаваемое этим полем уравнение, определенное на медленной кривой, называется медленным уравнением. Динамика возмущенной системы (при
) на истинной медленной кривой приближается медленным уравнением с точностью .Смешанная система
Для анализа быстро-медленных систем часто оказывается полезно рассмотреть так называемую смешанную систему. Будем считать, что на медленной кривой динамика задается медленным уравнением, а вне медленной кривой — быстрой системой. «Траектория» такой системы (так называемая «сингулярная траектория») представляет собой кусочно-гладкую кривую, состоящую из чередующихся дуг устойчивой части медленной кривой и быстрых срывов.
В быстро-медленных системах на плоскости (то есть когда быстрая и медленная переменные одномерны), при выполнении некоторых условий невырожденности, сингулярные траектории смешанной системы позволяют «моделировать» поведение быстро-медленной системы при малых
: «настоящая» траектория проходит в -окрестности от сингулярной. Её динамика состоит из чередующихся фаз медленного «дрейфа» вблизи устойчивых участков медленной кривой и быстрых «срывов» вдоль траекторий быстрого движения.В ходе «медленного» движения траектория проходит фиксированное расстояние за время порядка
 , при этом экспоненциально притягиваясь к соответствующей истинной медленной кривой (и другим траекториям).
, при этом экспоненциально притягиваясь к соответствующей истинной медленной кривой (и другим траекториям).Релаксационные циклы
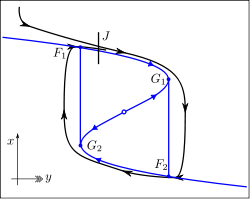 Релаксационный цикл в быстро-медленной системе типа осциллятора Ван дер Поля
Релаксационный цикл в быстро-медленной системе типа осциллятора Ван дер ПоляРассмотрим следующую быстро-медленную систему, связанную с осциллятором Ван-дер-Поля:

Её медленная кривая — кубическая парабола
 . (См. рис.) Рассматривая смешанную систему, легко построить так называемый «сингулярный цикл», проходящий через точки
. (См. рис.) Рассматривая смешанную систему, легко построить так называемый «сингулярный цикл», проходящий через точки  ,
,  ,
,  ,
,  . Отметим, что цикл получается благодаря тому, что медленное поле направлено вправо в верхней части графика и влево в нижней; при этом на неустойчивой части медленной кривой медленная система имеет неподвижную точку.
. Отметим, что цикл получается благодаря тому, что медленное поле направлено вправо в верхней части графика и влево в нижней; при этом на неустойчивой части медленной кривой медленная система имеет неподвижную точку.При
 вблизи этого сингулярного цикла у быстро-медленной системы появляется «настоящий» устойчивый предельный цикл. Действительно, истинная медленная кривая вблизи участка
вблизи этого сингулярного цикла у быстро-медленной системы появляется «настоящий» устойчивый предельный цикл. Действительно, истинная медленная кривая вблизи участка  продолжается в прямом времени за точку срыва , срывается вниз, достигает окрестности нижней части медленной кривой, далее двигается влево вблизи истинной медленной кривой, соответствующей участку
продолжается в прямом времени за точку срыва , срывается вниз, достигает окрестности нижней части медленной кривой, далее двигается влево вблизи истинной медленной кривой, соответствующей участку  , претерпевает срыв вверх и снова попадает в окрестность дуги . В связи с эффектом экспоненциального сближения траекторий при движении вблизи устойчивых участков медленной кривой (см. конец предыдущего раздела), отображение Пуанкаре с трансверсали
, претерпевает срыв вверх и снова попадает в окрестность дуги . В связи с эффектом экспоненциального сближения траекторий при движении вблизи устойчивых участков медленной кривой (см. конец предыдущего раздела), отображение Пуанкаре с трансверсали  на себя (см. рис.) является сжимающим отображением, а следовательно имеет неподвижную точку. Это и означает, что система имеет предельный цикл. Про такую систему также говорят, что она испытывает релаксационные колебания.
на себя (см. рис.) является сжимающим отображением, а следовательно имеет неподвижную точку. Это и означает, что система имеет предельный цикл. Про такую систему также говорят, что она испытывает релаксационные колебания.Исторический обзор
Релаксационные колебания
Впервые релаксационные колебания были обнаружены в радиотехнике. Для описания колебаний в контуре, включающем в себя два сопротивления, ёмкость, индуктивность и тетрод, Б. Ван-дер-Поль предложил в конце 20-х годов XX века[2] обыкновенное дифференциальное уравнение второго порядка (уравнение Ван-дер-Поля), зависящее от параметра, который мы будем обозначать через
 . Указанный параметр выражался через параметры элементов контура. При малых колебания в контуре были близки к гармоническим, однако с увеличением их характер менялся, и при больших значениях параметра в динамике колебательного процесса стали выделяться участки двух типов: «медленного» изменения и быстрых «скачков» с одного состояния на другое. Ван-дер-Поль предложил называть такие колебания релаксационными , и выдвинул гипотезу, что при
. Указанный параметр выражался через параметры элементов контура. При малых колебания в контуре были близки к гармоническим, однако с увеличением их характер менялся, и при больших значениях параметра в динамике колебательного процесса стали выделяться участки двух типов: «медленного» изменения и быстрых «скачков» с одного состояния на другое. Ван-дер-Поль предложил называть такие колебания релаксационными , и выдвинул гипотезу, что при  соответствующие решения становятся разрывными. (В связи с этим релаксационные колебания также часто называются разрывными.)
соответствующие решения становятся разрывными. (В связи с этим релаксационные колебания также часто называются разрывными.)Аналогичные эффекты также наблюдались и в других физических системах. В частности, в ходе анализа различных схем мультивибраторов, А. А. Андроновым и А. А. Виттом было обнаружено [1], что некоторые «паразитные» параметры (такие как сопротивление или самоиндукция проводника), традиционно отбрасываемые в силу своей относительной малости при построении модели, могут существенно влиять на поведение системы: например, участвовать в образовании положительных обратных связей и тем самым играть ключевую роль в возникновении автоколебаний. Таким образом, их отбрасывание приводило к неадекватной модели. Первоначально влияние малых параметров удалось учесть путем введения «постулата скачка», предложенного Л. И. Мандельштамом, в соответствии с которым из физических соображений декларировалось, что достигнув некоторого состояния система «мгновенно» переходит в другое состояние. Математическое обоснование «постулата скачка» было получено Н. А. Железцовым и Л. В. Родыгиным [3][4], и потребовало рассмотрения уравнений, в которых «паразитный» малый параметр входил коэффициентом при старшей производной, и его учет повышал порядок уравнения — или, иными словами, размерность фазового пространства соответствующей системы. Таким образом, с 40-х годов различными исследователями стали рассматриваться системы вида

((*)) или, после перехода к другому масштабу времени
 :
: 
((**)) где
и могут быть, вообще говоря, многомерными координатами, а — малый параметр. К системе аналогичного вида приводится классическое уравнение Ван-дер-Поля с помощью преобразования Льенара (при этом  ). Такие системы в современной терминологии получили название «быстро-медленных»: координата — быстрая, — медленная. Интерес представляет асимптотическое поведение решений при .
). Такие системы в современной терминологии получили название «быстро-медленных»: координата — быстрая, — медленная. Интерес представляет асимптотическое поведение решений при .Быстрая и медленная системы
Фазовые портреты систем (*) и (**) при фиксированном
совпадают, но предельное поведение при различно: предел (*) называется медленной системой (она задает движение в «медленном времени»  ), а предел (**) — быстрой . Трактории быстрой системы лежат в плоскостях
), а предел (**) — быстрой . Трактории быстрой системы лежат в плоскостях  , а множество нулей функции
, а множество нулей функции  , называемое медленной поверхностью , целиком состоит из особых (неподвижных) точек быстрой системы (которые, таким образом, не являются изолированными). Наоборот, траектории медленной системы целиком лежат на медленной поверхности.
, называемое медленной поверхностью , целиком состоит из особых (неподвижных) точек быстрой системы (которые, таким образом, не являются изолированными). Наоборот, траектории медленной системы целиком лежат на медленной поверхности.Рассмотрение этих предельных систем позволило объяснить появление «мгновенных скачков». Медленная система соответствует модели, при построении которой «паразитные» малые параметры были отброшены. Она адекватно описывает поведение реальной системы при малых
, но лишь до тех пор, пока движение происходит вблизи участков медленной поверхности, состоящих из устойчивых особых точек быстрой системы. Однако, траектория медленной системы может в какой-то момент достигнуть границы притягивающего участка. В этот момент траектория реальной системы при может испытать срыв : уйти из окрестности медленной поверхности и переключиться с медленного движения на быстрое, задающееся быстрой системой. Это и есть наблюдающийся «скачок» (в медленном масштабе времени он происходит «мгновенно», то есть траектория имеет разрыв; в быстром — за время порядка  ), который невозможно объяснить, пренебрегая малыми параметрами. При этом траектория, следуя быстрой динамике, может вновь попасть на устойчивый участок медленной поверхности, после чего быстрое движение снова сменится медленным, и т. д.
), который невозможно объяснить, пренебрегая малыми параметрами. При этом траектория, следуя быстрой динамике, может вновь попасть на устойчивый участок медленной поверхности, после чего быстрое движение снова сменится медленным, и т. д.Таким образом, стало возможным описывать поведение решений быстро-медленных систем, рассматривая в них чередующиеся фазы медленного движения вдоль устойчивых участков медленной поверхности, определяемых медленной системой, и срывов вдоль траекторий быстрой системы. В случае, если быстрая и медленная координаты одномерны (то есть рассматриваются быстро-медленные системы на плоскости), этому описанию удовлетворяет типичная траектория типичной системы. Замкнутая траектория, проходящая через участки быстрых и медленных движений, является релаксационным циклом, ответственным за появление релаксационных колебаний.
Дальнейшие исследования в этой области были направлены преимущественно на нахождение асимптотик по
для различных параметров истинных траекторий системы при (например, периода релаксационных колебаний). Существенные трудности вызвал анализ динамики в окрестности точек срыва, где и происходит переключение с быстрого движения на медленное. Эта задача была решена Л. С. Понтрягиным и Е. Ф. Мищенко в конце 50-х годов [5][6]. Важные результаты были получены А. Н. Тихоновым, А. Б. Васильевой, Л. Флэтто, Н. Левинсоном и др. [7]. Первые члены асимптотического ряда для периода релаксационных колебаний в уравнении Ван-дер-Поля были впервые посчитаны А. А. Дородницыным [8]. Ряд асимптотик для общего случая быстро-медленной системы на плоскости были получены Ж. Хаагом в 40-х годах [9][10]. Методы, разработанные Понтрягиным и Мищенко, позволили получить полные асимптотики решений типичных быстро-медленных систем на плоскости, изложенные в монографии Е. Ф. Мищенко и Н. Х. Розова [11], ставшей классической.Затягивание потери устойчивости и утки
Однако, оказалось, что указанное простое качественное описание не исчерпывает всех возможных типов траекторий быстро-медленных систем. Так, в 70-х годах Понтрягиным было обнаружено явление затягивания потери устойчиовсти : оказалось, что в аналитических быстро-медленных системах с двумерной быстрой координатой после прохождения границы устойчивости траектория может находиться длительное время вблизи уже неустойчивой части медленной поверхности (проходя вдоль неё отделенное от нуля расстояние), и лишь затем претерпевать срыв и переключаться на быстрое движение. На конкретном примере этот эффект был исследован в работе М. А. Шишковой [12] в 1973, проведенной под руководством Понтрягина; общий случай проанализировал А. И. Нейштадт [13] в 1985 г.
Близкий эффект был обнаружен учениками Ж. Риба (Е. Бенуа, Дж. Калло, Ф. Дьене, М. Дьене)[14][15] в начале 80-х годов в быстро-медленных системах с одной быстрой и одной медленной переменной. Они исследовали рождение релаксационного предельного цикла в системе Ван-дер-Поля с дополнительным параметром. Оказалось, что когда при фиксированном
этот параметр проходит экспоненциально узкий (по ) интервал (то есть интервал длины порядка  ), предельный цикл, рождающийся из особой точки в результате бифуркации Андронова — Хопфа проходит через несколько стадий эволюции прежде чем приобрести вид классического релаксационного цикла. При этом, как оказалось, для промежуточных значений параметра, соответствующие предельные циклы проходят вблизи некоторых дуг неустойчивой части медленной кривой. Такие траектории получили название «у́ток» (фр. canard, сейчас также используется английское англ. duck) — частично благодаря контринтуитивности эффекта, который поначалу был воспринят как «газетная утка», частично из-за своей формы, отдаленно напоминающей летящую утку [7][16]. Уточные решения были обнаружены в различных химических, биологических и других моделях.[17]
), предельный цикл, рождающийся из особой точки в результате бифуркации Андронова — Хопфа проходит через несколько стадий эволюции прежде чем приобрести вид классического релаксационного цикла. При этом, как оказалось, для промежуточных значений параметра, соответствующие предельные циклы проходят вблизи некоторых дуг неустойчивой части медленной кривой. Такие траектории получили название «у́ток» (фр. canard, сейчас также используется английское англ. duck) — частично благодаря контринтуитивности эффекта, который поначалу был воспринят как «газетная утка», частично из-за своей формы, отдаленно напоминающей летящую утку [7][16]. Уточные решения были обнаружены в различных химических, биологических и других моделях.[17]Первоначально, уточные решения исследовались методами нестандартного анализа, однако вскоре к ним удалось применить ставшие уже классическими методы асимптотических рядов (У. Эккауз [18], Е. Ф. Мищенко, А. Ю. Колесов, Ю. С. Колесов, Н. Х. Розов [19][20]), а позже — геометрическую теорию сингулярно-возмущенных систем (разработанную Н. Феничелем [21]) с помощью метода раздутия (Ф. Дюмортье и Р. Руссари [22], М. Крупа и П. Смолян [23]). Оказалось, что уточные решения являются «редким» явлением в системах на плоскости. В частности, притягивающие уточные циклы, которые могут быть обнаружены в ходе численного эксперимента, появляются только при наличии дополнительного параметра, причем множество «уточных» значений этого параметра при фиксированным
является экспоненциально узким по .В 2001 году Ю. С. Ильяшенко и Дж. Гукенхеймер обнаружили [24] принципиально новое поведение для быстро-медленных систем на двумерном торе. Было показано, что для некоторого конкретного семейства систем, в отсутствие дополнительных параметров, для сколь угодно малого значения
система может иметь устойчивый уточный цикл. Впоследствии, И. В. Щуров показал[25], что подобное явление наблюдается и типичным образом — в некотором открытом множестве быстро-медленных систем.Литература
- В. И. Арнольд, В. С. Афраймович, Ю. С. Ильяшенко, Л. П. Шильников. Теория бифуркаций // Динамические системы—5. Итоги науки и техники. Современные проблемы математики. Фундаментальные направления. — М.: ВИНИТИ, 1986. — Т. 5. — С. 5—218. — ISSN 0233-6723.
- Д. В. Аносов О развитии теории динамических систем за последнюю четверть века, глава Теория сингулярных возмущений.
См.также
Примечания
- ↑ 1 2 Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. — 2-е издание. — 1959. — С. 727-855. — 914 с.
- ↑ van der Pol, B., On relaxation-oscillations, The London, Edinburgh and Dublin Phil. Mag. and J. of Sci., 2:7 (1927), 978—992
- ↑ Железцов Н. А., Родыгин Л. В. К теории симметричного мультивибратора. — Докл. АН СССР, 81:3 (1951), 391—392.
- ↑ Железцов Н. А., К теории разрывных колебаний в системах второго порядка. Изв. высших учебных заведений. Радиофизика 1:1 (1958), 67—78.
- ↑ Л. С. Понтрягин, Асимптотическое поведение решений систем дифференциальных уравнений с малым параметром при высших производных, Изв. АН СССР. Сер. матем., 21:5 (1957), 605—626
- ↑ Е. Ф. Мищенко, Л. С. Понтрягин, Вывод некоторых асимптотических оценок для решений дифференциальных уравнений с малым параметром при производных, Изв. АН СССР. Сер. матем., 23:5 (1959), 643—660
- ↑ 1 2 см. работы, цитируемые в В. И. Арнольд, В. С. Афраймович, Ю. С. Ильяшенко, Л. П. Шильников. Динамические системы — 5. ВИНИТИ, Современные проблемы математики. Фундаментальные направления. 5, 1986 и Е. Ф. Мищенко, Н. Х. Розов, Дифференциальные уравнения малым параметром и релаксационные колебания, Москва, Наука, 1975.
- ↑ А. А. Дородницын, Асимптотическое решение уравнения Ван-дер-Поля, Прикл. матем. и механ., 11:3 (1947), 313—328
- ↑ Haag J. Etude asymptotique des oscillations de relaxation. Ann. Sci. Ecole Norm. Sup. 60 (1943).
- ↑ Haag J. Examples concrets d’etude asymptotique d’oscillations de relaxation. Ann. Sci. Ecole Norm. Sup. 61 (1944).
- ↑ Е. Ф. Мищенко, Н. Х. Розов, Дифференциальные уравнения малым параметром и релаксационные колебания, Москва, Наука, 1975.
- ↑ Шишкова М. А. Рассмотрение одной системы дифференциальных уравнений с малым параметром при высших производных.— Докл. АН СССР, 1973, 209:3, 576—579.
- ↑ Нейштадт А. И. Асимптотическое исследование потери устойчивости равновесия при медленном прохождении пары собственных чисел через мнимую ось. Успехи мат. наук, 1985, 40:5, 190—191
- ↑ E. Benoit, J. F. Callot, F. Diener, M. Diener. Chasse au canard. Collectanea Mathematica, 31—32 (1981), 37—119.
- ↑ M. Diener, The canard unchained or how fast/slow dynamical systems bifurcate, The Mathematical Intelligencer 6 (1984), 38—48.
- ↑ Martin Wechselberger, Canards, Scholarpedia, 2(4):1356 (2007),
- ↑ (См. напр. J. Moehlis, Canards in a Surface Oxidation Reaction. J. of Nonlinear Sci. 12:4, 319—345 и цитированные там работы.
- ↑ W. Eckhaus, Relaxation oscillations including a standard chase on French ducks, in Asymptotic Analysis II, Springer Lecture Notes Math. 985 (1983), 449—494.
- ↑ А. Ю. Колесов, Е. Ф. Мищенко. Явление затягивания Л. С. Понтрягина и устойчивые циклы-утки многомерных релаксационных систем с одной медленной переменной. Математический сборник, 181:5 (1990), 579—588.
- ↑ Мищенко Е. Ф., Колесов Ю. С., Колесов А. Ю., Розов Н. Х. Периодические движения и бифуркационные процессы в сингулярно возмущенных системах. Москва, «Физико-математическая литература», 1995
- ↑ N. Fenichel, Geometric singular perturbation theory for ordinary differential equations, J. of Diff. Eq., 31 (1979), pp. 53—98.
- ↑ F. Dumortier and R. Roussarie, Canard cycles and center manifolds, Mem. Amer. Math. Soc., 121:577 (1996).
- ↑ M. Krupa, P. Szmolyan, Extending geometric singular perturbation theory to nonhyperbolic points —- fold and canard points in two dimensions, SIAM J. Math. Anal., 33:2, 286—314.
- ↑ J. Guckenheimer, Yu. S. Ilyashenko, The Duck and the Devil: Canards on the Staircase, Moscow Math. J., 1:1, (2001), 27—47.
- ↑ I. V. Schurov, Ducks on the torus: existence and uniqueness, Journal of dynamical and control systems, 16:2 (2010), 267—300.


Для улучшения этой статьи желательно?: - Проставить интервики в рамках проекта Интервики.
Категории:- Дифференциальные уравнения
- Динамические системы


Wikimedia Foundation. 2010.