- Mars Exploration Rover
-
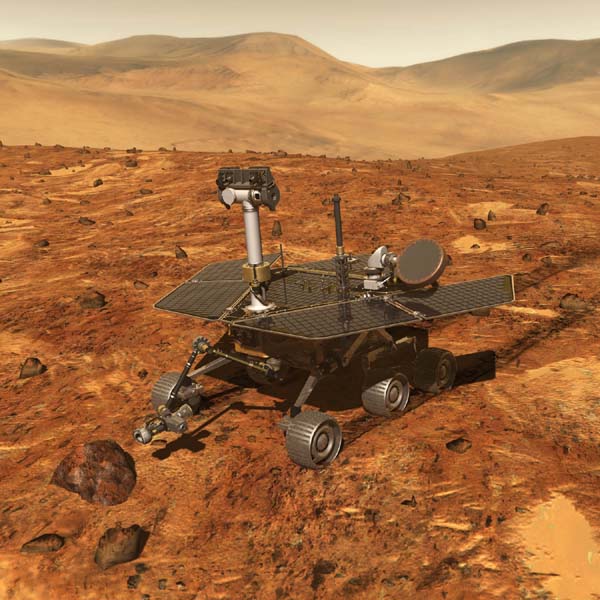
 Марсоход MER на Марсе в представлении художника
Марсоход MER на Марсе в представлении художника
Mars Exploration Rover (MER) — продолжающаяся в настоящее время американская роботизированная межпланетная миссия NASA, в которую включены два марсианских вездехода — Spirit и Opportunity, исследующие планету Марс.
Миссия начата в июле 2003 отправкой двух роверов — MER-A Спирит (Spirit) и MER-B Оппортьюнити (Opportunity) для исследования поверхности Марса и его геологии (англ.)русск.[1][2], которые совершили посадку на Марс 4 и 25 января 2004. Научный руководитель проекта — Стив Скваерс. Название марсоходам были даны в рамках традиционного конкурса НАСА 9-летней девочкой русского происхождения Софи Коллиз, родившейся в Сибири и удочеренной американской семьей из Аризоны[3].
В ставшей чрезвычайно успешной миссии при базовом 90-дневном сроке эксплуатации марсоходов Спирит проработал более 6 лет до 2011, а Оппортьюнити работает и по состоянию на 2012, намного превысив рекорд продолжителности функционирования аппаратов на Марсе. Автоматическая межпланетная станция (АМС) с марсоходами запускались ракетой-носителем Дельта-2 с космодрома на мысе Канаверал (Флорида, США. Прототипы марсоходов MER испытывались в земных пустынях с 2002.
 Места посадок на Марсе среди других аппаратов (Спирит - справа, Оппортьюнити - в центре)
Места посадок на Марсе среди других аппаратов (Спирит - справа, Оппортьюнити - в центре) Компоновка марсохода
Компоновка марсохода Марсоход MER в сравнении с предшественником Соджонер и человеком
Марсоход MER в сравнении с предшественником Соджонер и человеком Первый вид поверхности Марса с MER (Спирит, район кратера Гусева)
Первый вид поверхности Марса с MER (Спирит, район кратера Гусева)Содержание
Цели миссии
Основной задачей миссии было изучение осадочных пород, которые, как предполагалось, должны были образоваться в кратерах (Гусева, Эребус и смежных), где когда-то могло находиться озеро или море. Однако классические осадочные породы найдены не были, в кратере в основном встречались породы вулканического происхождения.
Перед миссией марсохода были поставлены следующие научные цели[4]:
- Поиск и описание разнообразия горных пород и почв, которые свидетельствуют о прошлой водной активности планеты. В частности, поиск образцов с содержанием минералов, которые отлагались под воздействием осадков, выпарения, осаждения или гидротермальной активности.
- Определение распространения и состава минералов, горных пород и почв, которые окружают место посадки.
- Определение того, какие геологические процессы сформировали рельеф местности и химический состав. Эти процессы могут включать в себя водную или ветровую эрозию, отложение осадков, гидротермальные механизмы, вулканизм и образование кратеров.
- Проведение калибровки и проверки наблюдений за поверхностью, сделанных при помощи инструментов Марсианского разведывательного спутника. Это поможет определить точность и эффективность различных инструментов, которые используются для изучения марсианской геологии с орбиты.
- Поиск железосодержащих минералов, выявление и количественная оценка относительных величин по определенным типам минералов, которые содержат воду или были сформированы в воде, таких как железосодержащие карбонаты.
- Квалификация минералов и геологических текстур и определение процессов, которые их образовали.
- Поиск геологических причин, сформировавших те условия окружающей среды, которые существовали, когда на планете присутствовала жидкая вода. Оценка того, насколько данные условия были благотворны для жизни.
Конструкция аппаратов
Автоматическая межпланетная станция проекта MER включает посадочный модуль и перелётный двигательный блок. Для разных этапов торможения в атмосфере Марса и посадки посадочный модуль обрамлён двумя коническими аэродинамическими щитами и имеет парашютную систему, ракетные двигатели и шаровидные воздушные подушки.
Марсоход имеет 6 колёс. Источником электроэнергии служат солнечные батареи мощностью до 140ватт[5]. При массе в 185 кг аппарат оснащён буром, несколькими камерами, микроскопом и двумя спектрометрами, смонтированными на манипуляторе.
Поворотный механизм марсохода выполнен на основе сервоприводов. Такие приводы расположены на каждом из передних и задних колёс, средняя пара таких деталей не имеет. Поворот передних и задних колёс марсохода осуществляется при помощи электромоторов, действующих независимо от моторов, обеспечивающих перемещение аппарата.
Когда марсоходу необходимо повернуть, двигатели включаются и поворачивают колеса на нужный угол. Всё остальное время двигатели, наоборот, препятствуют повороту, чтобы аппарат не сбивался с курса из-за случайного движения колёс. Переключение режимов поворот-тормоз производится с помощью реле.
Также марсоход способен копать грунт, вращая одно из передних колес, сам оставаясь при этом неподвижным. Бортовой компьютер построен на процессоре RAD6000 с частотой 20 МГц, 128 МБ DRAM ОЗУ, 3 МБ EEPROM и 256 МБайт флэш-памяти[6]. Рабочая температура робота от минус 40 до плюс 40 °C. Для работы при низких температурах используется радиоизотопный нагреватель, который может дополняться также электрическими нагревателями, когда это необходимо. Для теплоизоляции применяется аэрогель и золотая фольга.
-

Посадочный модуль на сборке (Оппортьюнити)
-

Старт ракеты Дельта-2 с АМС с марсоходом (Спирит)
-

Посадочный модуль при входе в атмосферу Марса
-

Парашют и ракетные двигатели посадочного модуля перед посадкой
-

Воздушные подушки посадочного модуля
-

Посадка с амортизацией посадочного модуля
-

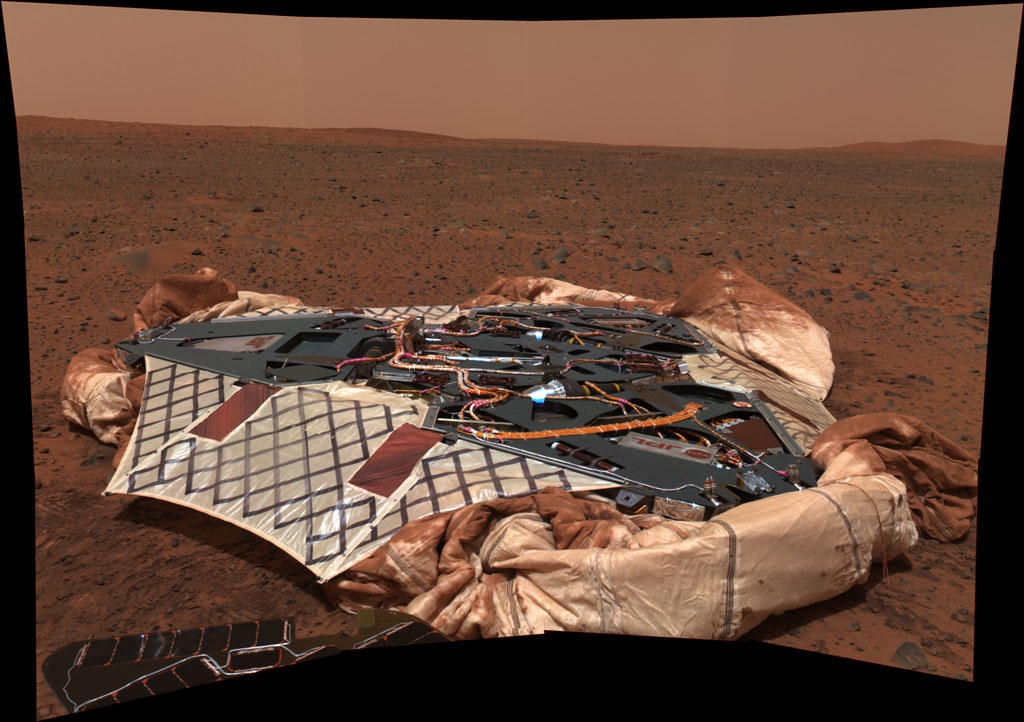
Посадочная платформа на Марсе (Спирит)
-

Следы марсохода на марсианской поверхности (Спирит)
-

Манипулятор марсохода (Спирит)
-

Главная панорамная камера марсохода MER
Фильмография
- Три эпизода документального сериала «Nova»
- «Камни Марса. Год спустя», 2005
- «Катание по Марсу», 2006
- «Пять лет на Марсе (Марсианские роботы)», 2008
- «Гибель марсохода» (англ. Death of a Mars Rover) — фильм, снятый National Geographic в 2011 г.
 Одна из марсианских панорам с MER (Спирит)
Одна из марсианских панорам с MER (Спирит)См. также

Mars Exploration Rover на Викискладе? - Соджонер — первый марсоход, работал на Марсе в 1997 году.
- Оппортьюнити — второй марсоход NASA из двух запущенных в рамках проекта Mars Exploration Rover.
- Феникс — спускаемый аппарат на полюсе Марса для работы одновременно со Спиритом и Оппортьюнити. Сел в мае 2008. Погиб в июне 2010, не пережив марсианскую зиму.
- Куриосити — следующий марсоход
Примечания
- ↑ NASA Extends Operations for Its Long-Lived Mars Rovers
- ↑ Mission Timeline: Launch - archived
- ↑ Максим Борисов Названия американским марсоходам дала девятилетняя сирота из Сибири (рус.). Грани.Ру (10.06.2003). Архивировано из первоисточника 24 августа 2011. Проверено 17 мая 2010.
- ↑ Научные цели марсохода (англ.). НАСА. Архивировано из первоисточника 24 августа 2011. Проверено 5 июня 2011.
- ↑ Mars Exploration Rover Mission: The Mission
- ↑ Документ с сайта НАСА (PDF) (англ.)
Ссылки
- Сайт проекта
- Новости о Spirit и Opportunity на сайте Compulenta.ru
- Популярная статья «Поиск на планете Аэлиты»
- Прогулки с Марсоходами
- Спецификация процессора IBM RAD6000
- xkcd.com // Spirit — комикс xkcd.

Исследования Марса космическими аппаратами Пролётная траектория Маринер-4 • Маринер-6 и -7 • Марс-4 • Розетта • Dawn
С орбиты СА и марсоходы Марс-3 и ПрОП-М • Программа «Викинг» (Викинг-1 / -2) • Pathfinder / Sojourner • MER (Spirit • Оппортьюнити) • Феникс • Curiosity
Будущие миссии MAVEN • Экзомарс • InSight • Фобос-Грунт 2 • Марс-нет и MetNet • Марс-астер • Sample Return Mission • Марс-грунт • пилотируемый полёт
...неудачные Марс-1 • -60A • -60B (1М-М60) • -62A • -62B (2МВ-М62) • Зонд-2А • -2 (3МВ-М64) • Маринер-3 • -8 • Марс-69A • -69B (М69) • Марс-2 (СА и марсоход ПрОП-М) • -71C (М71) • Марс-4 • -7 (М73) • Фобос-1 / -2 (СА ПрОП-Ф и ДАС) • Observer • Марс-96 • Surveyor 98 (Climate Orbiter • Polar Lander) • Нодзоми • Бигль-2 • Фобос-Грунт и Инхо-1
...отменённые Вояджер • Марс-4НМ (Марсоход) • -5НМ • -5М (Марс-79) • Веста (англ.) • Surveyor Lander • NetLander (англ.) • телекоммуникационный орбитальный аппарат • Beagle 3 (англ.) • Astrobiology Explorer-Cacher (англ.)
См. также Жирным выделены действующие АМС Категории:- Марсоходы
- Исследование Марса
- Космонавтика США
- НАСА














Wikimedia Foundation. 2010.