- Метод градиентов
-
Градиентный спуск — метод нахождения локального минимума (максимума) функции с помощью движения вдоль градиента. Для минимизации функции в направлении градиента используются методы одномерной оптимизации, например, метод золотого сечения. Также можно искать не наилучшую точку в направлении градиента, а какую-либо лучше текущей.
Сходимость метода градиентного спуска зависит от отношения максимального и минимального собственных чисел матрицы Гессе в окрестности минимума (максимума). Чем больше это отношение, тем хуже сходимость метода.
Содержание
Описание
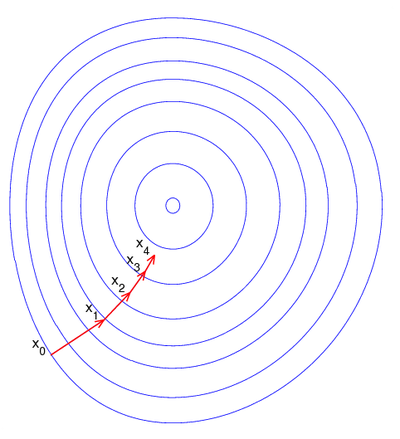 Иллюстрация последовательных приближений к точке экстремума в направлении наискорейшего спуска (красн.) в случае дробного шага. Синим отмечены линии уровня.
Иллюстрация последовательных приближений к точке экстремума в направлении наискорейшего спуска (красн.) в случае дробного шага. Синим отмечены линии уровня.Пусть целевая функция имеет вид:
 .
.
И задача оптимизации задана следующим образом:
Основная идея метода заключается в том, чтобы идти в направлении наискорейшего спуска, а это направление задаётся антиградиентом
 :
:![\overrightarrow{x}^{[j+1]}=\overrightarrow{x}^{[j]}-\lambda^{[j]}\nabla F(\overrightarrow{x}^{[j]}) \!](/pictures/wiki/files/57/995db8c1d4c6a934a121ac5fbcf522a0.png)
где λ[j] выбирается
- постоянной, в этом случае метод может расходиться;
- дробным шагом, т.е. длина шага в процессе спуска делится на некое число;
- наискорейшим спуском:
![\lambda^{[j]}=\mathrm{argmin}_{\lambda} \,F(\vec{x}^{[j]}-\lambda^{[j]}\nabla F(\vec{x}^{[j]})) \!](/pictures/wiki/files/53/5eb20f0743d8433839751da0aeeed0a8.png)
Алгоритм
- Задают начальное приближение и точность расчёта

- Рассчитывают , где
- Проверяют условие остановки:
- Если
![|\vec{x}^{[j+1]}-\vec{x}^{[j]}|>\varepsilon\!](/pictures/wiki/files/48/07573eb00648bfca89650dc2f01cc4be.png) , то j = j + 1 и переход к шагу 2.
, то j = j + 1 и переход к шагу 2. - Иначе
![\vec{x}=\vec{x}^{[j+1]}\!](/pictures/wiki/files/100/dddd2f43b0e579cc1c43cea783f73684.png) и останов.
и останов.
- Если
Пример
Применим градиентный метод к функции
 . Тогда последовательные приближения будут выглядеть так:
. Тогда последовательные приближения будут выглядеть так: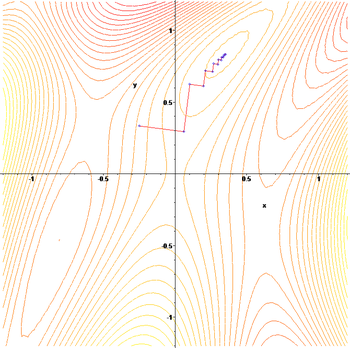
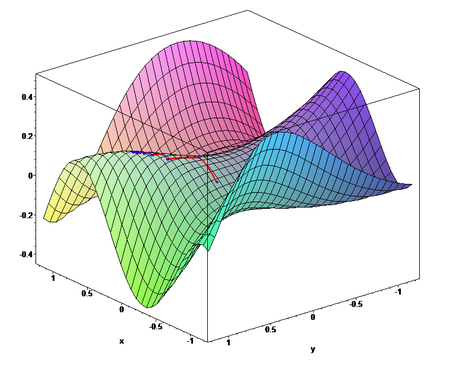
Упомянем, что метод наискорейшего спуска может иметь трудности в патологических случаях овражных функций, так, к примеру, в случае функции Розенброка.
Пример реализации
C++
#include <vector> #include <iostream> #include <Math.h> #include <string> #include <sstream> #include <TCHAR.h> using namespace std; typedef vector<double> DataList; void InitData(); void GradSearch(DataList &p, double sigma,double epsilon); void QMin(DataList &de_dxi, DataList &p, double epsilon, double sigma); void getDfDx(DataList &de_dxi, DataList &p); string CreateResultString(DataList &pMin,double yMin); double getFunc(DataList &p); string stringify(double x); DataList p1; DataList p2; DataList pMin; DataList de_dxi; double yMin; double err; double z0; double h; int N; int j; int main(int argc, _TCHAR* argv[]) { N = 2; InitData(); DataList p; p.push_back(0.99); p.push_back(1.01); double sigma = 0.0000000001; double epsilon = 0.0000000001; GradSearch(p, sigma, epsilon); return 0; } void GradSearch(DataList &p, double sigma,double epsilon) { int max = 60; h = 1; err = 1; int count = 0; while(count < max && (h>sigma ||err > epsilon)) { getDfDx(de_dxi, p); QMin(de_dxi, p, epsilon, sigma); for(int i = 0; i<N; i++) p.at(i) = pMin.at(i); z0 = yMin; count = count + j + 1; string iterResult = CreateResultString(pMin, yMin); cout<<CreateResultString(pMin, yMin)<<endl; } cout<<endl<<"Минимум функции: "<<"-4*x + x*x - y - x*y + y*y"<<endl; cout<<CreateResultString(pMin, yMin)<<endl; } void QMin(DataList &de_dxi,DataList &p, double epsilon, double sigma) { int cond = 0; int jmax = 60; z0 = getFunc(p); for(int i = 0; i<N; i++) p1.at(i) = p.at(i) + h * de_dxi.at(i); double y1 = getFunc(p1); for(int i = 0; i<N; i++) p2.at(i) = p.at(i) + 2 * h * de_dxi.at(i); double y2 = getFunc(p2); j = 0; while (j<jmax && cond == 0) { if (z0<=y1) { for(int i = 0; i<N; i++) p2.at(i) = p1.at(i); y2 = y1; h = h / 2; for(int i = 0; i<N; i++) p1.at(i) = p.at(i) + h * de_dxi.at(i); y1 = getFunc(p1); } else if (y2 < y1) { for(int i = 0; i<N; i++) p1.at(i) = p2.at(i); y1 = y2; h = h*2; for(int i = 0; i<N; i++) p2.at(i) = p.at(i) + 2 * h * de_dxi.at(i); y2 = getFunc(p2); } else { cond = -1; } j = j+1; if (h < sigma) cond = 1; } double hMin = (h/2)* (4 * y1 - 3* z0 - y2) / (2* y1 - z0 - y2); for (int i = 0; i< N; i++) { pMin.at(i) = p.at(i) + hMin * de_dxi.at(i); } yMin = getFunc(pMin); double h0 = fabs(hMin); double h1 = fabs(hMin - h); double h2 = fabs(hMin - 2* h); if (h0 < h) h = h0; if (h1 < h) h = h1; if (h2 < h) h = h2; if (h == 0) h = hMin; if (h < sigma) cond = 1; double e0 = fabs(z0 - yMin); double e1 = fabs(y1 - yMin); double e2 = fabs(y2 - yMin); if (e0 != 0 && e0 < err) err = e0; if (e1 != 0 && e1 < err) err = e1; if (e2 != 0 && e2 < err) err = e2; if (e0 == 0 && e1 == 0 && e2 == 0) err = 0; if (err < epsilon) cond = 2; } double getFunc(DataList &p) { double x = p.at(0); double y = p.at(1); double result = -4 * x + x*x - y - x * y + y * y; return result; } void getDfDx(DataList & de_dxi, DataList &p) { double x = p.at(0); double y = p.at(1); double dfDx = -4+2*x-y; double dfDy = -1-x+2*y; double norm = sqrt(dfDx*dfDx + dfDy*dfDy); dfDx = -dfDx/norm; dfDy = -dfDy/norm; de_dxi.at(0) = dfDx; de_dxi.at(1) = dfDy; } void InitData() { for(int i = 0; i<N; i++) { p1.push_back(0); p2.push_back(0); pMin.push_back(0); de_dxi.push_back(0); } } string stringify(double x) { ostringstream o; if (!(o << x)) return 0; return o.str(); } string CreateResultString(DataList &pMin,double yMin) { string resultStr = "f["; for(int i = 0; i<N; i++) { if (i != 0) resultStr += ","; resultStr += stringify(pMin.at(i)); } resultStr += "] = " + stringify(yMin); return resultStr; }
Ссылки
- Mathematics Department at Cal State Fullerton
- Поиск глобального оптимума для задач оптимального проектирования систем или определения оптимальных законов управления.
Литература
- Акулич И.Л. Математическое программирование в примерах и задачах: Учеб. пособие для студентов эконом. спец. вузов. — М.: Высш. шк., 1986.
- Гилл Ф., Мюррей У., Райт М. Практическая оптимизация. Пер. с англ. — М.: Мир, 1985.
- Коршунов Ю.М., Коршунов Ю.М. Математические основы кибернетики. — М.: Энергоатомиздат, 1972.
- Максимов Ю.А.,Филлиповская Е.А. Алгоритмы решения задач нелинейного программирования. — М.: МИФИ, 1982.
- Максимов Ю.А. Алгоритмы линейного и дискретного программирования. — М.: МИФИ, 1980.
- Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. — М.: Наука, 1970. — С. 575-576.
См. также
Wikimedia Foundation. 2010.