- Механизм Липкина
-
 Механизм Липкина-Посселье:
Механизм Липкина-Посселье:
звенья, показанные одним цветом, имеют одинаковую длинуМеханизм Липкина — Посселье (англ. Peaucellier–Lipkin linkage), изобретённый в 1864 году, был первым плоским механизмом, способным преобразовывать вращательное движение в совершенное прямолинейное (инверсор), и наоборот. Назван в честь французского офицера Никола Посселье (1832—1913), и литовца еврейского происхождения Йома Това Липкина.[1][2]
До этого изобретения существовавшие методы создания прямолинейного движения требовали наличия направляющих, что особенно значимо для деталей машин и для технологических процессов. В частности, без использования этого или подобных ему изобретений поршень в поршневом насосе нуждается в прочной заделке в месте крепления к штоку (см. плунжер).
Это изобретение сыграло важную роль в развитии паровых машин.
Математическое описание механизма Липкина-Посселье прямо связана с инверсией окружности.
Существует также более ранний механизм прямолинейного движения, история которого недостаточно хорошо известна, — механизм Саррюса. Этот механизм появился на 11 лет раньше механизма Липкина-Посселье. Он состоит из нескольких шарнирно-сочленённых прямоугольных пластин, две из которых остаются параллельными, но могут двигаться друг к другу. Механизм Саррюса принадлежит к классу пространственных механизмов, в отличие от механизма Липкина-Посселье, являющегося плоским механизмом.
Содержание
Геометрия механизма
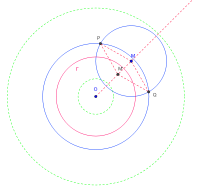
 Геометрические построения для механизма Липкина-Посселье
Геометрические построения для механизма Липкина-Посселье
На геометрических построениях можно увидеть шесть звеньев постоянной длины: OA, OC, AB, BC, CD, DA. Длина звена OA равна длине OC, и длины звеньев AB, BC, CD DA равны между собой, образуя параллелограмм. В то же время, точка O остаётся неподвижной. Если точка B производит вынужденное движение по окружности (на рисунке показанной красным), проходящей через точку О, то точка D обязательно будет двигаться по прямой линии (показана голубым). С другой стороны, если точка B будет вынужденно двигаться по прямой (не проходящей через О), то точка D будет двигаться по окружности, проходящей через О.
 Геометрия механизма
Геометрия механизмаДругие способы преобразования вращательного движения в прямолинейное
- Механизм Чебышева
- Механизм Хойкена
- Механизм Ватта
- Кривошипно-шатунный механизм
- Механизм планшайба-стержни
- Кулачковый механизм
См. также
Ссылки
Примечания
Механизмы Вращательные Передачи (Механическая • Зубчатая • Червячная • Цепная • Ремённая • Фрикционная • Карданная) • Шарнир равных угловых скоростей • Муфта (Кулачково-дисковая • Зубчатая • Центробежная • Обгонная) • Храповой • Мальтийский
Прямолинейные Ползун (крейцкопф) • Кривошипно-шатунный • планшайба-стержни • Качающий подшипник • Шотландский • Реечная передача • Винтовая передача • Лебёдка (Ворот) • Саррюса • Липкина — Посселье
...приближённо Поступательные Сложное движение Категория:- Простейшие механизмы


Wikimedia Foundation. 2010.