- Процесс Грама ― Шмидта
-
Процесс Грама (англ.) ― Шмидта — это один из алгоритмов, в которых на основе счётного множества линейно независимых векторов
 строится множество ортогональных векторов
строится множество ортогональных векторов  или ортонормированных векторов
или ортонормированных векторов  , причём так, что каждый вектор
, причём так, что каждый вектор  или
или  может быть выражен линейной комбинацией векторов
может быть выражен линейной комбинацией векторов  .
.Содержание
Классический процесс Грама — Шмидта
Алгоритм
Пусть имеются линейно независимые векторы
.Определим оператор проекции следующим образом:
где
 — скалярное произведение векторов
— скалярное произведение векторов  и
и  . Этот оператор проецирует вектор ортогонально на вектор .
. Этот оператор проецирует вектор ортогонально на вектор .Классический процесс Грама — Шмидта выполняется следующим образом:
На основе каждого вектора
 может быть получен нормированный вектор:
может быть получен нормированный вектор:  (у нормированного вектора направление будет таким же, как у исходного, а длина — единичной).
(у нормированного вектора направление будет таким же, как у исходного, а длина — единичной).Результаты процесса Грама — Шмидта:
— система ортогональных векторов либо — система ортонормированных векторов.Вычисление
носит название ортогонализации Грама — Шмидта, а — ортонормализации Грама — Шмидта.Доказательство
Докажем ортогональность векторов
.Для этого вычислим скалярное произведение
 , подставив в него формулу (2). Мы получим ноль. Равенство нулю скалярного произведения векторов означает, что эти вектора ортогональны. Затем вычислим скалярное произведение
, подставив в него формулу (2). Мы получим ноль. Равенство нулю скалярного произведения векторов означает, что эти вектора ортогональны. Затем вычислим скалярное произведение  , используя результат для и формулу (3). Мы снова получим ноль, то есть вектора
, используя результат для и формулу (3). Мы снова получим ноль, то есть вектора  и
и  ортогональны. Общее доказательство выполняется методом математической индукции.
ортогональны. Общее доказательство выполняется методом математической индукции.Геометрическая интерпретация — вариант 1
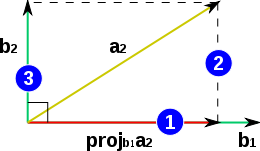 Рис. 1. Второй шаг процесса Грама — Шмидта
Рис. 1. Второй шаг процесса Грама — ШмидтаРассмотрим формулу (2) — второй шаг алгоритма. Её геометрическое представление изображено на рис. 1:
1 — получение проекции вектора
 на ;
на ;2 — вычисление
 , то есть перпендикуляра, которым выполняется проецирование конца на . Этот перпендикуляр — вычисляемый в формуле (2) вектор
, то есть перпендикуляра, которым выполняется проецирование конца на . Этот перпендикуляр — вычисляемый в формуле (2) вектор  ;
;3 — перемещение полученного на шаге 2 вектора
в начало координат. Это перемещение сделано на рисунке лишь для наглядности. Оно не является математическим действием и поэтому не отражается в формуле (2).На рисунке видно, что вектор
ортогонален вектору , так как является перпендикуляром, по которому проецируется на .Рассмотрим формулу (3) — третий шаг алгоритма — в следующем варианте:
Её геометрическое представление изображено на рис. 2:
 Рис. 2. Третий шаг процесса Грама — Шмидта
Рис. 2. Третий шаг процесса Грама — Шмидта1 — получение проекции вектора
 на ;
на ;2 — получение проекции вектора
на ;3 — вычисление суммы
 , то есть проекции вектора на плоскость, образуемую векторами и . Эта плоскость закрашена на рисунке серым цветом;
, то есть проекции вектора на плоскость, образуемую векторами и . Эта плоскость закрашена на рисунке серым цветом;4 — вычисление
 , то есть перпендикуляра, которым выполняется проецирование конца на плоскость, образуемую векторами и . Этот перпендикуляр — вычисляемый в формуле (6) вектор ;
, то есть перпендикуляра, которым выполняется проецирование конца на плоскость, образуемую векторами и . Этот перпендикуляр — вычисляемый в формуле (6) вектор ;5 — перемещение полученного
в начало координат. Это перемещение сделано на рисунке лишь для наглядности. Оно не является математическим действием и поэтому не отражается в формуле (6).На рисунке видно, что вектор
ортогонален векторам и , так как является перпендикуляром, по которому проецируется на плоскость, образуемую векторами и .Таким образом, в процессе Грама — Шмидта для вычисления
выполняется проецирование  ортогонально на гиперплоскость?, формируемую векторами
ортогонально на гиперплоскость?, формируемую векторами  . Вектор затем вычисляется как разность между и его проекцией. То есть — это перпендикуляр? от конца к гиперплоскости?, формируемой векторами . Поэтому ортогонален векторам, образующим эту гиперплоскость?.
. Вектор затем вычисляется как разность между и его проекцией. То есть — это перпендикуляр? от конца к гиперплоскости?, формируемой векторами . Поэтому ортогонален векторам, образующим эту гиперплоскость?.Геометрическая интерпретация — вариант 2
Рассмотрим проекции некоторого вектора
на вектора и как компоненты вектора в направлениях и (рис. 3):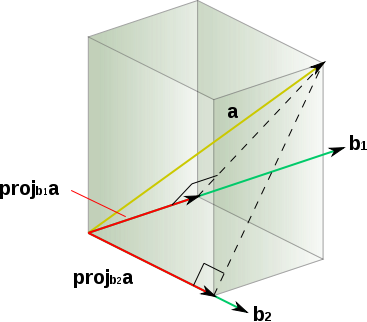 Рис. 3. Вектор имеет компоненты в направлениях и
Рис. 3. Вектор имеет компоненты в направлениях и Если удалить из
компоненту в направлении , то станет ортогонален (рис. 4): Рис. 4. Вектор имеет компоненту в направлении , а компонента в направлении отсутствует (нулевая)
Рис. 4. Вектор имеет компоненту в направлении , а компонента в направлении отсутствует (нулевая)Если из
удалить компоненты в направлениях и , то станет ортогонален и , и (рис. 5): Рис. 5. Вектор не имеет компонент в направлениях и
Рис. 5. Вектор не имеет компонент в направлениях и В формуле (2) из вектора
удаляется компонента в направлении вектора . Получаемый вектор не содержит компоненту в направлении и поэтому ортогонален вектору .В формуле (3) из вектора
удаляются компоненты в направлениях и (формуле 3 соответствует переход от рис. 3 к рис. 5; рис. 4 не соответствует формуле 3). Получаемый вектор ортогонален векторам и .В формуле (4) из вектора
 удаляются компоненты в направлениях
удаляются компоненты в направлениях  . Получаемый вектор
. Получаемый вектор  ортогонален векторам .
ортогонален векторам .Таким образом, по формулам (1) — (4) на основе векторов
получается набор ортогональных векторов .Численная неустойчивость
При вычислении на ЭВМ по формулам (1) — (5) вектора
часто не точно ортогональны из-за ошибок округления. Из-за потери ортогональности в процессе вычислений классический процесс Грама — Шмидта называют численно неустойчивым.Модифицированный процесс Грама — Шмидта
Процесс Грама — Шмидта может быть сделан более вычислительно устойчивым путём небольшой модификации. Вместо вычисления
какэтот вектор вычисляется следующим образом:
Геометрическая интерпретация
Рассмотрим получение
по формулам (8) — (11):Геометрически это показано на рис 6:
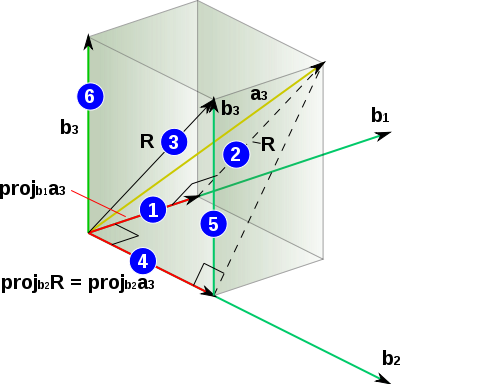 Рис. 6. Геометрическое представление модифицированного процесса
Рис. 6. Геометрическое представление модифицированного процессаНа рис. 6 вектор
 обозначен как
обозначен как  .
.1 — получение проекции вектора
на для формулы (12), то есть компоненты в направлении ;2 — вычитание по формуле (12), то есть удаление из
компоненты в направлении . Получаемый вектор ортогонален , так как не имеет компоненты в направлении ;3 — перенос вектора
в начало координат. Это перемещение сделано на рисунке лишь для наглядности. Оно не является математическим действием и поэтому не отражается в формуле (12).4 — получение проекции вектора
на для формулы (13), то есть компоненты в направлении ;5 — вычитание по формуле (13), то есть удаление из
компоненты в направлении . Получаемый вектор ортогонален , так как не имеет компоненты в направлении . При вычитании из компоненты в направлении в результирующем векторе не появляется компонента в направлении ;6 — перенос вектора
в начало координат. Это перемещение сделано на рисунке лишь для наглядности. Оно не является математическим действием и поэтому не отражается в формуле (13).Таким образом, получаемый на рис. 6 вектор
не имеет компонент в направлениях и и поэтому ортогонален и .
Рассмотрим непосредственно формулы (8) — (11).В формуле (8) из вектора
удаляется компонента в направлении вектора . Получаемый вектор  не содержит компоненту в направлении и поэтому ортогонален вектору .
не содержит компоненту в направлении и поэтому ортогонален вектору .Далее в формуле (9) из результата удаляется его компонента в направлении вектора
. Получаемый вектор  не содержит компоненту в направлении и поэтому ортогонален вектору .
не содержит компоненту в направлении и поэтому ортогонален вектору .Путём дальнейшего последовательного удаления из результата его компонент получается вектор
, не содержащий компонент в направлениях и потому ортогональный векторам .Эквивалентность классического и модифицированного процессов
Классический и модифицированный процессы можно сопоставить следующим образом:
Формула (14) показывает вычисление
в классическом процессе, а формула (15) — в модифицированном.Разница между (14) и (15) заключается в том, от каких векторов вычисляются компоненты: от
в классическом процессе или от результата предыдущего вычитания, то есть от  в модифицированном процессе. представляет собой , из которого удалены компоненты в направлениях
в модифицированном процессе. представляет собой , из которого удалены компоненты в направлениях  . Компонента вектора в направлении
. Компонента вектора в направлении  при этом удалении не затрагивается и поэтому она в такая же, как в . Другими словами,
при этом удалении не затрагивается и поэтому она в такая же, как в . Другими словами,На рис. 6 равенство (16) имеет форму «
 ».
».Равенство (16) отображено знаками "||" между формулами (14) и (15). Это позволяет видеть, что формулы (14) и (15) эквивалентны. Таким образом, классический и модифицированный процессы эквивалентны, но только при идеально точных вычислениях. Реальные вычисления имеют погрешность из-за ошибок округления.
Особые случаи
Процесс Грама — Шмидта может применяться также к бесконечной последовательности линейно независимых векторов.
Кроме того, процесс Грама — Шмидта может применяться к линейно зависимым векторам. В этом случае он выдаёт
 (нулевой вектор) на шаге
(нулевой вектор) на шаге  , если является линейной комбинацией векторов
, если является линейной комбинацией векторов  . Если это может случиться, то для сохранения ортогональности выходных векторов и для предотвращения деления на ноль при ортонормировании алгоритм должен делать проверку на нулевые вектора и отбрасывать их. Количество векторов, выдаваемых алгоритмом, будет равно размерности подпространства, порождённого векторами (т.е. количеству линейно независимых векторов, которые можно выделить среди исходных векторов).
. Если это может случиться, то для сохранения ортогональности выходных векторов и для предотвращения деления на ноль при ортонормировании алгоритм должен делать проверку на нулевые вектора и отбрасывать их. Количество векторов, выдаваемых алгоритмом, будет равно размерности подпространства, порождённого векторами (т.е. количеству линейно независимых векторов, которые можно выделить среди исходных векторов).Свойства
- Произведение длин
 равно объёму параллелепипеда, построенного на векторах системы как на рёбрах.
равно объёму параллелепипеда, построенного на векторах системы как на рёбрах.
Единственность результата
Матрица перехода от
к  и множество векторов определяются однозначно, если принять, что диагональные элементы матрицы перехода положительны.
и множество векторов определяются однозначно, если принять, что диагональные элементы матрицы перехода положительны.Дополнительные толкования
Процесс Грама ― Шмидта может быть истолкован как разложение невырожденной квадратной матрицы в произведение ортогональной (или унитарной матрицы в случае эрмитова пространства) и верхнетреугольной матрицы с положительными диагональными элементами ― QR-разложение, что есть частный случай разложения Ивасавы.
Реализации
Реализация для пакета Mathematica
Данный скрипт, предназначенный для пакета Mathematica, проводит процесс ортогонализации Грама ― Шмидта над векторами, заданными в фигурных скобках предпоследней строки. Количество векторов и их координат могут быть произвольными. В данном случае для примера взяты векторы
 ,
,  ,
,  .
.Projection[v1_, v2_] := (v1.v2*v2)/v2.v2 MultipleProjection[v1_, vecs_] := Plus @@ (Projection[v1, #1] &) /@ vecs GramSchmidt[mat_] := Fold[Join[#1, {#2 - MultipleProjection[#2, #1]}] &, {}, mat] GramSchmidt[{{-2, 1, 0}, {-2, 0, 1}, {-0.5, -1, 1}}]Литература
- Беклемишев Д. В. Курс аналитической геометрии и линейной алгебры. — М.: Наука.
Категория:- Линейная алгебра














Wikimedia Foundation. 2010.