- ШИМ контроллер
-
Технологии модуляции Аналоговая модуляция AM · SSB · ЧМ(FM) · ФМ(PM) · СКМ Цифровая модуляция АМн · ФМн · КАМ · ЧМн · GMSK
OFDMИмпульсная модуляция ИКМ · ШИМ · ЧИМ · ФИМ Расширение спектра FHSS · См. также: Демодуляция Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM)) — приближение желаемого сигнала (многоуровневого или непрерывного) к действительным бинарным сигналам (с двумя уровнями - вкл/выкл), так, что, в среднем, за некоторый отрезок времени, их значения равны. Формально, это можно записать так:
 ,
,
где x(t) - желаемый входной сигнал в пределе от t1 до t2, а ∆Ti - продолжительность i -го ШИМ импульса, каждого с амплитудой A. ∆Ti подбирается таким образом, что суммарные площади (энергии) обеих величин приблизительно равны за достаточно продолжительный промежуток времени, равны так же и средние значения величин за период:
 .
.
Управляемыми "уровнями", как правило, являются параметры питания силовой установки, например, напряжение импульсных преобразователей /регуляторов постоянного напряжения/или скорость электродвигателя. Для импульсных источников x(t) = Uconst стабилизации.ШИП — широтно-импульсный преобразователь, генерирующий ШИМ-сигнал по заданному значению управляющего напряжения. Основное достоинство ШИМ — высокий КПД его усилителей мощности, который достигается за счёт использования их исключительно в ключевом режиме. Это значительно уменьшает выделение мощности на силовом преобразователе (СП).
Применение
При широтно-импульсной модуляции в качестве несущего колебания используется периодическая последовательность прямоугольных импульсов, а информационным параметром, связанным с дискретным модулирующим сигналом, является длительность этих импульсов. Периодическая последовательность прямоугольных импульсов одинаковой длительности имеет постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив импульсы через ФНЧ с частотой среза, значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив постоянное напряжение. Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП: значения отсчётов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
ШИМ использует транзисторы (могут быть и др. элементы) не в активном (правильнее будет сказать - линейном), а в ключевом режиме, то есть транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет бесконечное сопротивление, поэтому ток в цепи не течёт, и, хотя всё напряжение питания падает на транзисторе, то есть КПД=0 %, в абсолютном выражении выделяемая на транзисторе мощность равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю — выделяемая мощность так же мала.1.
2.

Принцип работы ШИМ
ШИМ есть импульсный сигнал постоянной частоты и переменной скважности, то есть отношения длительности импульса к периоду его следования. С помощью задания скважности (длительности импульсов) можно менять среднее напряжение на выходе ШИМ.
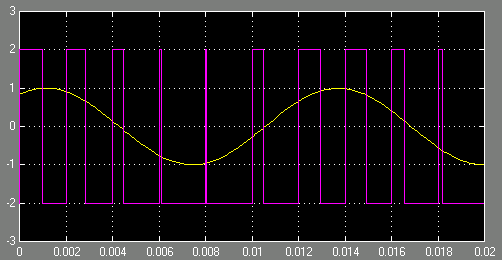
Генерируется аналоговым компаратором, на отрицательный вход которого подаётся опорный сигнал в виде «пилы» или «треугольника», а на положительный — собственно сам модулируемый непрерывный аналоговый сигнал. Частота импульсов соответствует частоте «зубъев» пилы. Ту часть периода, когда входной сигнал выше опорного, на выходе получается единица, ниже — нуль.
В цифровой технике, выходы которой могут принимать только одно из двух значений, приближение желаемого среднего уровня выхода при помощи ШИМ является совершенно естественным. Схема настолько же проста: пилообразный сигнал генерируется N-битным счётчиком. Цифровые устройства (ЦШИП) работают на фиксированной частоте, обычно намного превышающей реакцию управляемых установок (передискретизация). В периоды между фронтами тактовых импульсов, выход ЦШИП остаётся стабильным, на нём действует либо низкий уровень либо высокий, в зависимости от выхода цифрового компаратора, сравнивающего значение счётчика с уровнем приближаемого цифрового сигнала V(n). Выход за много тактов можно трактовать как череду импульсов с двумя возможными значениями 0 и 1, сменяющими друг-друга каждый такт Т. Частота появления единичных импульсов получается пропорциональной уровню приближаемого сигнала ~V(n). Единицы, следующие одна за другой, формируют контур одного, более широкого импульса. Длителности полученных импульсов переменной ширины ~V(n), кратны периоду тактирования T, а частота равна 1/(T*2N). Низкая частота означает длительные, относительно T, периоды постоянства сигнала одного уровня, что даёт невысокую равномерность распределения импульсов.
Описанная цифровая схема генерации подпадает под определение однобитной (двухуровневой) импульсно-кодовой модуляции (ИКМ). 1-битную ИКМ можно рассматривать в терминах ШИМ как серию импульсов частотой 1/T и шириной 0 либо T. Добиться усреднения за менее короткий промежуток времени позволяет имеющаяся передискретизация. Высоким качеством обладает такая разновидность однобитной ИКМ, как импульсно-плотностная модуляция (pulse density modulation), которая ещё именуется импульсно-частотной модуляцией.
Восстанавливается непрерывный аналоговый сигнал арифметическим усреднением импульсов за много периодов при помощи простейшего фильтра низких частот. Хотя обычно даже этого не требуется, так как электромеханические составляющие привода обладают индуктивностью, а объект управления (ОУ) — инерцией, импульсы с выхода ШИП сглаживаются и ОУ, при достаточной частоте ШИМ-сигнала, ведёт себя как при управлении обычным аналоговым сигналом.
Ссылки
Программирование аппаратного ШИМ в микроконтроллерах AVR и PIC на языке Си на примерах.
Програмно-аппаратный многоканальный ШИМ в AVR для управления 8 servo рулевыми машинками.
Wikimedia Foundation. 2010.