- Функция влияния
-
Наличие в выборках даже небольшого числа резко выделяющихся наблюдений способно фатально повлиять на результат статистического исследования (к примеру, того же метода наименьших квадратов или метода максимального правдоподобия), и может получиться так, что значения, полученные в результате, перестанут нести в себе какой-либо смысл.
Для того, чтобы избежать подобных неприятностей, необходимо каким-то образом снизить влияние «плохих» наблюдений, либо вовсе исключить их. Однако возникает вопрос: «Как отличить „плохое“ наблюдение от „хорошего“?» Даже самый простой из подходов — субъективный (основанный на внутренних ощущениях статистика) — может принести значительную пользу, однако для отбраковки все же предпочтительнее применять методы, имеющие в своей основе некие строгие математические обоснования, а не только интуитивные предположения исследователя. Этот процесс представляет собой весьма нетривиальную задачу для статистика и определяет собой одно из направлений статистической науки.
Содержание
Понятие робастности[1][2]
Под робастностью в статистике понимают нечувствительность к различным отклонениям и неоднородностям в выборке, связанным с теми или иными, в общем случае неизвестными, причинами. Это могут быть ошибки детектора, регистрирующего наблюдения, чьи-то добросовестные или не очень попытки «подогнать» выборку до того, как она попадёт к статистику, ошибки оформления, вкравшиеся опечатки и многое, многое другое.
Например, наиболее робастной оценкой параметра сдвига закона распределения является медиана, что на интуитивном уровне вполне очевидно (для строгого доказательства следует воспользоваться тем, что медиана является усечённой М-оценкой, см. ниже).[1]
Помимо непосредственно «бракованных» наблюдений также может присутствовать некоторое количество наблюдений, подчиняющихся другому распределению. Ввиду условности законов распределений, а это не более, чем красивые модели описания, сама по себе выборка может содержать некоторые расхождения с идеалом.
Тем не менее, параметрический подход настолько вжился, доказав свою простоту и целесообразность, что нелепо от него отказываться. Поэтому и возникла необходимость приспособить старую проверенную модель к новым задачам.
Стоит отдельно подчеркнуть и не забывать, что отбракованные наблюдения нуждаются в отдельном, более пристальном внимании. Наблюдения, кажущиеся «плохими» для одной гипотезы, могут вполне соответствовать другой. Наконец, отнюдь не всегда резко выделяющиеся наблюдения являются «браком». Одно такое наблюдение для генной инженерии, к примеру, стоит миллионов других, мало отличающихся друг от друга.
Основные подходы
Для того, чтобы ограничить влияние неоднородностей, либо вовсе его исключить, существует множество различных подходов. Среди них выделяются два основных направления:
- Сгруппировать данные, не отбраковывая отдельные наблюдения, таким образом значительно снизив возможность порчи выборки отдельными выпадами. После чего с достаточной степенью уверенности пользоваться классическими методами статистики.
- Отслеживать выбросы непосредственно в процессе анализа. Например, для определения параметров закона распределения использовать итерационную процедуру с усечёнными или th-сниженными M-оценками .[1]
Группирование данных как метод робастной статистики
Посредством группирования выборки можно резко снизить влияние отдельных наблюдений, не отбрасывая их. Разбиение на интервалы не представляет особых трудностей и даёт весьма ощутимый результат. Существует три наиболее распространённых способа разбиения:
- Разбиение на интервалы равной длины. Наиболее простой и потому распространённый способ.
- Разбиение на интервалы равной вероятности, также называемое равночастотным группированием, что отражает практическую реализацию этого метода. В результате такого группирования выборки осуществляется максимизация величины информационной энтропии
 , где
, где  и достигается наибольшая асимптотическая мощность критерия согласия
и достигается наибольшая асимптотическая мощность критерия согласия  , либо критерия отношения правдоподобия.[3]
, либо критерия отношения правдоподобия.[3]
- Разбиение на асимптотически оптимальные интервалы. При таком разбиении минимизируются потери информации в результате группирования, то есть максимизируется фишеровская информация
 , где
, где  — оцениваемый параметр закона. Для многих законов распределения удалось получить инвариантные относительно параметров границы интервалов, и были составлены соответствующие таблицы. Такое разбиение позволяет максимизировать мощность критерия.
— оцениваемый параметр закона. Для многих законов распределения удалось получить инвариантные относительно параметров границы интервалов, и были составлены соответствующие таблицы. Такое разбиение позволяет максимизировать мощность критерия.
Подход, основанный на функции влияния[1]
Введение
В данном разделе рассматриваются аспекты, касающиеся оценивания параметров закона распределения по «засорённой» выборке с использованием подхода, предложенного Хампелем. Для того, чтобы изучить влияние отдельно взятого наблюдения на оценку (рассматриваемую статистику) того или иного параметра закона распределения Хампелем вводится так называемая функция влияния (influence function), которая представляет собой ни что иное, как производную этой статистики.
Основные понятия
Введём функционал
 , как функцию от некоторой выборки
, как функцию от некоторой выборки  из распределения
из распределения  c параметром
c параметром  (оно же
(оно же  ). зависит от
). зависит от  . Значит является функцией от закона и от параметра . Пусть также удовлетворяет некоторым условиям состоятельности и регулярности:
. Значит является функцией от закона и от параметра . Пусть также удовлетворяет некоторым условиям состоятельности и регулярности:Определим производную этого функционала
в точке с распределением следующим образом: где
где  — некая функция, смысл которой прояснится на следующем шаге, а
— некая функция, смысл которой прояснится на следующем шаге, а  — некий закон распределения, отличный от .
— некий закон распределения, отличный от .Подставим
 , приписывающую единичную массу событию
, приписывающую единичную массу событию  , вместо , в результате чего от интеграла в правой части выражения останется только
, вместо , в результате чего от интеграла в правой части выражения останется только  , и перепишем получившийся результат в следующем виде:
, и перепишем получившийся результат в следующем виде: Эту функцию и называют функцией влияния.
Эту функцию и называют функцией влияния.
Чтобы пояснить смысл введённого понятия подставим
 вместо
вместо  , заменив предел. В результате выражение
, заменив предел. В результате выражение  преобразуется в
преобразуется в  , что соответствует ситуации, когда в выборку, состоящую из
, что соответствует ситуации, когда в выборку, состоящую из  наблюдения, подчиняющихся распределению , добавляют ещё одно новое. Таким образом
наблюдения, подчиняющихся распределению , добавляют ещё одно новое. Таким образом  отслеживает реакцию используемого функционала на внесённое добавление, показывая влияние от вклада отдельного наблюдения
отслеживает реакцию используемого функционала на внесённое добавление, показывая влияние от вклада отдельного наблюдения  на оценку по всей совокупности данных.
на оценку по всей совокупности данных.Для характеристики влияния отдельных наблюдений также вводят понятие чувствительности к большой ошибке γ :
Если функция влияния ограничена, то соответствующую оценку называют B(бэ)-робастной.
М-оценки
Наиболее эффективными и широко используемыми оценками параметров законов распределений являются оценки максимального правдоподобия (ОМП), которые определяются одним из следующих условий:
где в случае негруппированной выборки
 , а в случае группированной —
, а в случае группированной — 
М-оценки — есть некое обобщение ОМП. Они определяются аналогично одним из соотношений:

Если наложить условие регулярности в подстановке
и продифференцировать его по в 0:то не представляет большого труда получить выражение функции влияния для M-оценок:
Указанное выражение позволяет сделать вывод о том, что M-оценки эквивалентны с точностью до ненулевого множителя-константы.
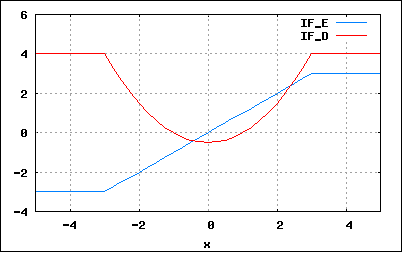 Пример функций влияния для усечённых ОМП параметров сдвига (син.) и параметра масштаба (красн.) стандартного нормального закона распределения.
Пример функций влияния для усечённых ОМП параметров сдвига (син.) и параметра масштаба (красн.) стандартного нормального закона распределения.Несложно проверить, что для ОМП стандартного нормального закона распределения
 функции влияния параметра сдвига и параметра масштаба выглядят соответственно:
функции влияния параметра сдвига и параметра масштаба выглядят соответственно:Эти функции неограничены, а это значит, что ОМП не является робастной в терминах B-робастности.
Для того, чтобы это исправить, M-оценки искусственно ограничивают, а значит и ограничивают ее
(см. выражение для M-оценок), устанавливая верхний барьер на влияние резко выделяющихся (далеко отстоящих от предполагаемых значений параметров) наблюдений. Делается это введением так называемых усечённых M-оценок, определяемых выражением:
где
 , и
, и  — оценки параметров сдвига и масштаба соответственно.
— оценки параметров сдвига и масштаба соответственно.Среди усечённых M-оценок оптимальными с точки зрения B-робастности являются усечённые ОМП.[1]
Процедура оценивания параметров
Чтобы решить уравнение
 необходимо воспользоваться каким-либо численным методом. Для этого понадобится выбрать начальные приближения. Нулевым параметром сдвига обычно служит медиана, параметром масштаба — значение, кратное медиане отклонений от медианы.
необходимо воспользоваться каким-либо численным методом. Для этого понадобится выбрать начальные приближения. Нулевым параметром сдвига обычно служит медиана, параметром масштаба — значение, кратное медиане отклонений от медианы.Например, если необходимо оценить параметр сдвига, скажем, нормального закона распределения, можно воспользоваться методом Ньютона численного нахождения корней уравнения. В результате вся процедура нахождения параметра сводится к итеративному вычислению выражения:
-
 ,
,
где
— некоторая оценка параметра масштаба, которая нужна для того, чтобы уравнять распределения с разным размахом.Литература
- ↑ 1 2 3 4 5 Хампель Ф., Рончетти Э., Рауссеу П., Штаэль В. Робастность в статистике. Подход на основе функций влияния. = Robust statistics: the approach based on influence functions. — М.: Мир, 1989.
- ↑ Хьюбер П. Робастность в статистике. — М.: Мир, 1984.
- ↑ Кендалл М., Стьюарт А. Статистические выводы и связи. — М.: Наука, 1973.
См. также
Интересную информацию по теме можно найти здесь
Ссылки
- Информационная энтропия
- Информация Фишера
- Критерий согласия Пирсона
- Метод максимального правдоподобия
- Метод наименьших квадратов
- Принцип максимального правдоподобия
- Распределение вероятностей
- Регрессионный анализ
- Статистические методы
- Точечная оценка
- Численные методы
- Функция правдоподобия





Wikimedia Foundation. 2010.