- ГИДРОЛОКАТОР
(сонар), аппаратурный комплекс для определения с помощью акустических сигналов положения подводных и плавучих объектов (первоначально этот термин использовался применительно к эхолокационным приборам для обнаружения подводных лодок, теперь употребляется в более широком значении). Главными элементами гидролокатора являются подводный излучатель мощного акустического сигнала и чувствительный приемник, реагирующий даже на слабые отражения этого сигнала от погруженных в воду объектов. Конструируются оба эти элемента с таким расчетом, чтобы их компоновка в локаторе обеспечивала определение направления на отражающий объект и расстояния до него. На подводных лодках и надводных судах гидролокаторы служат основными - а зачастую и единственными - средствами сбора информации об условиях и обстоятельствах под морской поверхностью. На атомных подводных лодках специальные гидролокаторы применяются в качестве навигационных приборов. Крупные корабли оснащаются эхолотами - гидролокаторами, измеряющими глубину океана. На многих рыбопромысловых судах гидролокаторы используют для обнаружения рыбных косяков; биологи, занимающиеся морскими животными, с помощью гидролокаторов изучают звуки, издаваемые представителями морской фауны. Под водой акустический пучок, подобно лучу прожектора или радара в воздухе, наводится на цель, и отраженная от нее звуковая энергия поступает в приемник. Из сонара, как из радара, излучение испускается короткими импульсами. Расстояние до цели определяется как произведение скорости звука в воде на половину временного интервала между испусканием импульса и прибытием его эха. Поскольку приемная антенна сонара имеет острую диаграмму направленности, пеленг цели определяется поворотом микрофона при его настройке на эхо. На практике оператор следит за световыми метками на панорамном экране, которые соответствуют обнаруженным объектам, и это значительно облегчает их локацию. Дальность действия гидролокатора ограничена радиусом в несколько километров. Скорость звука в воде равна приблизительно 1,5 км/с, поэтому гидролокационный поиск гораздо медлительней радиолокационного или светового поиска в атмосфере. Из-за относительно большой длины волны звука у гидролокатора довольно слабое пространственное разрешение: там, где глаз различал бы каждую заклепку на корпусе корабля, сонар "увидит" только все судно как единое пятно. К тому же морская вода - далеко не идеальная среда для распространения звука. Идея гидролокатора не нова. Еще во время Первой мировой войны гидрофоны применялись на надводных кораблях и подводных лодках для обнаружения вражеских судов методами пассивной шумопеленгации. Позже были созданы пьезоэлектрические преобразователи и электронные усилители сигналов звукового диапазона, что привело к развитию систем активной гидролокации. С тех пор разработано много видов совершенных приборов, среди них гидролокатор кругового обзора, гидролокатор переменной глубины и др.
Устройство гидролокатора. Гидролокаторы делятся на два основных типа: активные (излучающие сигнал и принимающие его отражение) и пассивные (принимающие шумы, издаваемые целью). Рассмотрим здесь блок-схему активного гидролокатора кругового обзора (рис. 1).
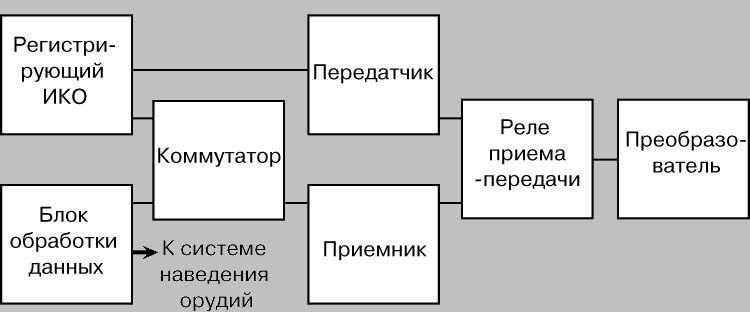
Рис. 1. БЛОК-СХЕМА АКТИВНОГО ГИДРОЛОКАТОРА кругового обзора (со сканированием по азимуту).
Преобразователь представляет собой устройство, в котором электрическая энергия преобразуется в механическую и наоборот. Такими преобразователями являются, например, микрофоны и громкоговорители. В гидролокаторе преобразователь исполняет обе функции. Обычно он размещается на днище надводного корабля и в верхней части корпуса подводной лодки. Иногда преобразователями служат пьезоэлектрические кристаллы (они меняют свои размеры при подаче на них электрического напряжения либо меняют форму при воздействии внешних сил, и на их поверхности возникает разность электрических потенциалов), но в данной схеме используется магнитострикционный (одновременно магнитоупругий) элемент - никелевый стержень с намотанной на него проволочной катушкой индуктивности. При нарастании электрического тока в катушке возникает магнитное поле, сжимающее стержень, при убывании тока - поле, растягивающее его. На конце стержня закреплена диафрагма, соприкасающаяся с водой, поэтому при сокращениях и удлинениях стержня в воде возбуждаются упругие колебания - звуковые волны. По прибытии эха все происходит в обратном порядке, и движения диафрагмы возбуждают ток в катушке. Набор таких преобразователей располагается по кругу в горизонтальной плоскости; каждый из них ориентирован в своем направлении. Передатчик воздействует на все преобразователи одновременно, и звуковые волны уходят сразу во всех направлениях. Но каждый преобразователь соединен с приемником отдельно, поэтому направление на цель определяется по тому элементу, который "слышит" эхо.
Передатчик. Оператор сидит за пультом управления, контролируя работу передатчика - мощного генератора ультразвуковых импульсов (средняя мощность типичного передатчика - ок. 8 кВт, пиковая в импульсе достигает 160 кВт). Несущая частота передатчика фиксирована ок. 20 кГц, а длительность импульса может меняться оператором от 0,005 до 0,1 с. Частота повторения импульсов тоже может варьироваться от 1 до 60 имп/мин - в зависимости от максимальной величины радиуса зоны обзора (все эхо-сигналы должны быть приняты до момента посыла следующего импульса). Выбор частоты передатчика зависит от нескольких величин, влияние которых противоположно: с увеличением частоты возрастают потери на трассе, но интенсивность принимаемых собственных шумов воды и габариты преобразователя становятся меньше. Из этих соображений наиболее выгодным диапазоном эхолокации является полоса частот от 18 до 24 кГц. Акустические устройства шумопеленгации наиболее эффективно работают на частотах ниже 1 кГц, на которых наиболее мощно излучаются шумы кораблей. Выходная мощность передатчика ограничивается сверху тем ее значением, при котором в воде возникает кавитация (см. КАВИТАЦИЯ). Кавитационные пузырьки незамедлительно отражают в преобразователь существенную долю излучаемой мощности. С увеличением давления (т.е. глубины) возрастает и допустимый предел излучаемой акустической мощности.
Реле приема-передачи. Так как один и тот же преобразователь выступает в роли излучателя и чувствительного элемента, его следует автоматически подключать то к передатчику, то к приемнику.
Приемник. Принимаемые различными чувствительными элементами сигналы раздельно поступают в приемно-усилительный тракт, а оттуда - на коммутатор. В приемном тракте есть специальные схемы подавления паразитных сигналов.
Коммутатор. Здесь принятый сигнал направляется по двум раздельным каналам - слухового контроля и видеоиндикации. Сегменты статора (неподвижной части коммутатора) расположены по кругу; на каждый из них поступает сигнал от определенного преобразователя. Положением первого ротора (с выходом на аудиоканал) управляет оператор, выбирая интересующее его направление прослушивания; гетеродинный конвертер канала слухового контроля переводит принятый сигнал на звуковую частоту 800 Гц и посылает его в головные телефоны оператора. Второй ротор коммутатора, связанный с видеоканалом, вращается с постоянной скоростью 1750 об/мин синхронно с разверткой индикатора кругового обзора, подобно тому как это делается в радаре, и позволяет визуализировать каждый эхо-сигнал с его пеленгом. За время между посылами двух последовательных импульсов зондирования развертка совершается дважды, так что все принятые отражения выводятся на экран индикатора (рис. 2).

Рис. 2. ИНДИКАТОР КРУГОВОГО ОБЗОРА (ИКО), на котором видны "земля" (LAND), две подводные лодки (SUB1 и SUB2) и собственный корабль (в центре ИКО).
Регистрирующий индикатор кругового обзора. Представляет собой электронно-лучевую трубку с круговой разметкой экрана, на котором отмечаются все обнаруженные объекты вблизи производящего гидролокацию корабля (ему соответствует круговое пятно в центре экрана). Поскольку отражения от более удаленных целей принимаются позже, развертка ведется по разворачивающейся спирали со скоростью 1 оборот в 1/1750 мин, и на том месте экрана, которое соответствует положению цели, возникает яркое световое пятно. Вращающаяся визирная линия и круговая шкала в 360° позволяют оператору определять истинный пеленг каждой цели. Кроме того, на экране имеется индекс дальности - маленькое световое пятно, которое оператор может вводить на экран для совмещения с изображением цели. Этот индекс связан с автоматическим счетчиком, вычисляющим расстояние до объекта. Выделяя на коммутаторе интересующее его направление, оператор по каналу слухового контроля оценивает характер конкретного эха и его происхождение - от косяка ли рыбы или подводной лодки, либо в результате подводной реверберации. Заодно можно оценить и направление движения цели, так как частота звука от приближающегося объекта выше, а от удаляющегося - ниже.
См. также ДОПЛЕРА ЭФФЕКТ. Блок обработки данных, куда поступает вся первичная информация о цели, вносит поправки с учетом условий распространения звука и движения самого судна с гидролокатором и выдает результаты расчетов дальности, пеленга, курса и скорости цели (необходимые, например, при наведении орудий боевого корабля).
Гидролокационные устройства. Гидрофоны представляют собой подводные аналоги микрофонов и используются при прослушивании шумов, исходящих от цели. На подводных лодках они служат средствами поиска и обнаружения противника чаще, чем гидролокаторы активного типа, так как при излучении локационного сигнала подводная лодка может обнаружить себя. Гидрофоны размещают по дну на входе в гавань; от них по кабелям сигналы поступают на наземные станции обработки, благодаря чему осуществляется постоянный контроль движения надводных и подводных судов в районе порта. Гидрофоны имеют ограниченные возможности, т.к. с их помощью нельзя непосредственно определить удаленность объекта; можно лишь установить направление на него. Гидролокатор с острой диаграммой направленности, излучая сигналы и принимая их отражения, обнаруживает цели и измеряет их дальности и пеленги. Поиск ведется последовательными шагами: оператор наводит преобразователь на заданное направление, посылает импульс и ждет его отражение; потом переходит на другой пеленг и повторяет все снова - и так до тех пор, пока не проверит всю зону обзора. Гидролокатор кругового обзора дает результаты гораздо быстрее (он рассмотрен выше при описании блок-схемы рис. 1). Аппаратура для определения глубины погружения цели работает совместно с активным гидролокатором, поскольку не имеет своего передатчика и лишь воспринимает отражения сигналов, испущенных активным прибором. Набор остронаправленных преобразовательных элементов этой аппаратуры имеет вид вертикальной линейки, сканируя которую получают в угловой мере данные о погружении цели; эта информация в совокупности с результатами измерений традиционных угломерных приборов позволяет определить глубину и дальность цели. Опускаемый с вертолета гидролокатор представляет собой преобразователь сферической формы, который спускается на длинном кабеле и погружается в воду при зависании вертолета; верхний конец кабеля соединен с бортовой аппаратурой. Такой гидролокатор служит для экстренного ненаправленного прослушивания эхо-сигналов в заданном районе. Береговая станция акустической пеленгации и обработки эхо-сигналов получает информацию от системы погруженных в различных местах гидрофонов, определяет пеленги удаленных объектов и расстояния до них. Гидролокатор переменной глубины, подобно вертолетному прибору, погружается на кабеле (но с борта надводного корабля и для решения иных задач) глубже сильно искажающего процесс распространения звуковых волн термоклина (слоя воды в океане с большим градиентом температуры), чем исключаются рефракционные потери при определении дальности объекта. Гидроакустические радиобуи - система плавучих устройств, каждое из которых несет на себе гидрофон и радиопередатчик индивидуальной частоты. Разбросанные с самолета в заданном районе, они посылают сигналы о присутствии, например, подводной лодки, сопоставление которых дает информацию о приблизительном ее местонахождении. Эхолот является упрощенным вариантом гидролокатора с острой диаграммой направленности, ориентированной на морское дно. Временная картина отраженных от дна звуковых сигналов автоматически регистрируется в цифровой или аналоговой форме (или в обеих одновременно) на карте. Гидроакустический телефон - своеобразный подводный аналог радиотелефона. Промодулированные голосом импульсы на ультразвуковой несущей частоте распространяются в воде и принимаются судном, где они детектируются и подаются в телефонную трубку. Такая система используется для связи подводных лодок между собой и с надводными кораблями. Береговая система дальнего обнаружения судов, терпящих бедствие (т.н. система СОФАР), функционирует благодаря сверхдальнему распространению звука (до нескольких тысяч километров от источника) по подводному звуковому каналу (см. ниже). Если в звуковом канале взорвать заряд, то по звуковому импульсу можно определить положение его источника, измеряя разность времен прихода импульсов, принятых ненаправленными приемниками в трех далеко отстоящих друг от друга пунктах. Бомбами для подачи подобных сигналов бедствия снабжаются подводные лодки и надувные спасательные плоты. Акустические системы самонаведения торпед являются по сути активными или пассивными гидролокационными устройствами для обнаружения и преследования цели; порой они оснащены и неконтактными гидроакустическими взрывателями.
ОСОБЕННОСТИ РАСПРОСТРАНЕНИЯ ЗВУКА В МОРСКОЙ ВОДЕ
Поглощение. Энергия звуковой волны в морской воде постепенно убывает из-за ее поглощения, обусловленного в основном двумя процессами: внутренним трением среды и диссоциацией растворенных в ней солей. Трение преобразует звуковую энергию в тепловую, а эффективность этого преобразования зависит от вязкости воды; обычно потери на трение составляют ок. 10% всего поглощения. Диссоциация молекул морских солей происходит вследствие того, что энергия звуковой волны, преобразуясь в химическую энергию, выводит молекулы из равновесного состояния, и они распадаются на ионы. Этот вид поглощения резко возрастает с увеличением частоты звука: на трассе длиной 1 км при частоте 1 кГц акустическая мощность падает приблизительно на 2%, а при частоте 20 кГц - уже почти на 60%.
Расходимость. Звуковое излучение, удаляясь от источника, расходится в пространстве, как свет и радиоволны; в результате этого интенсивность звука ослабевает пропорционально квадрату расстояния от излучателя.
Рассеяние. Затухание звука в море происходит и из-за его рассеяния на различных неоднородностях среды - взвешенных частицах, микроорганизмах и тепловых аномалиях. Обычно такие потери невелики, и их включают в суммарное поглощение; однако рассеяние спутным следом корабля или большим рыбным косяком может дать до 90% всех потерь, и его необходимо учитывать особо. Более важным следствием рассеяния оказывается то, что звук попадает в т.н. зоны акустической тени, где он рассеивается в многократных отражениях от граничных поверхностей.
Отражение. Поверхность океана активно отражает звук, но ее волны и рябь вызывают разброс направлений и фаз отраженных звуков, и между падающим и отраженным звуковыми пучками возникает интерференция, так что интенсивность звука в фиксированной точке пространства изменяется со временем по сложному закону. Дно тоже отражает звуки, но его коэффициент отражения сильно зависит от структуры дна и глубины. Илистое дно - плохой отражатель, а песчаное или скалистое - очень хороший. На небольших глубинах над дном из твердых пород вследствие многократных отражений звука от него и от водной поверхности возникает подводный звуковой канал, в котором создаются благоприятные условия для гидролокации.
Рефракция. Искривление звуковых "лучей" вызывается тем, что в разных (по глубине) слоях воды скорость звука различна и звуковой пучок отклоняется в сторону слоя с наименьшей скоростью. Скорость звука в морской воде при температуре 13° С, давлении 1 атм и концентрации солей 35 г/л равна 1494 м/с; она увеличивается с ростом температуры (3 м/с на 1° С), давления (0,016 м/с на 1 м глубины) и концентрации солей (1,3 м/с на 1 г/л). По горизонтали эти факторы влияния меняются очень медленно, но по глубине довольно быстро, поэтому океан как бы состоит из горизонтальных слоев с различной скоростью звука. Обычно вариации солености незначительны, и ими пренебрегают. Влияние давления хорошо известно и зависит лишь от глубины. Весьма существенно влияние температуры, а она переменчива, и для определения профиля скорости звука по глубине нужно измерять температуру воды на разных глубинах. Для этой цели с корабля спускают на кабеле специальный аппарат, именуемый батитермографом (он похож на небольшую торпеду), на котором имеются чувствительный термометр и самописец для автоматической регистрации зависимости температуры от глубины. Рефракцией звука в воде определяется формирование специфических условий его распространения, которые приводят к образованию четырех типов особых зон: звукового канала, изотермического слоя, поверхности с отрицательным градиентом и поверхности с положительным градиентом; в действительности могут создаваться и более сложные ситуации, когда условия, характерные для одной зоны, появляются и в другой.
Звуковой канал. В таком канале звуковые лучи, отклоняясь от его оси вверх или вниз, попадают в области большей скорости звука и вновь стремятся к оси канала. Когда они ее пересекают, процесс повторяется, и звуковой пучок оказывается в продольной ловушке, на оси которой скорость звука минимальна. Пучок распространяется по ней в горизонтальном направлении (рис. 3) на очень большое расстояние с малыми потерями. Из-за значительных суточных и сезонных колебаний температуры воды в поверхностных слоях океана (до глубины ок. 150 м) профили скорости звука в них очень меняются, но ниже все обстоит иначе - температура там низкая и почти постоянная. Скорость звука минимальна на глубине приблизительно 600 м. Ниже до самого дна температура почти не уменьшается, но скорость звука возрастает из-за повышающегося давления, - так образуется глубинный звуковой канал.

Рис. 3. РЕФРАКЦИЯ ПУЧКА акустических импульсов в подводном звуковом канале. а - профиль скорости звука; б - распределение акустического поля.
Изотермический слой. Температура приповерхностного слоя постоянна, и скорость звука в нем немного растет с глубиной из-за повышения давления. На нижней границе слоя температура резко падает (там он встречается с термоклином, ниже которого температура уменьшается очень медленно). Волны и конвективные потоки интенсивно перемешивают поверхностную толщу океана, выравнивая ее температуру, но глубина этого выравнивания колеблется от нуля (ранней весной) до 120 м (поздней осенью), что ограничивается термоклином (рис. 4). Под воздействием условий поверхностной толщи воды звуковой пучок раздваивается: верхняя часть из-за рефракции возвращается в слой смешения и, отразившись от границы с воздухом, начинает распространяться на большие расстояния; нижняя часть круто отклоняется к термоклину, образуя обширную зону молчания ниже изотермического слоя.
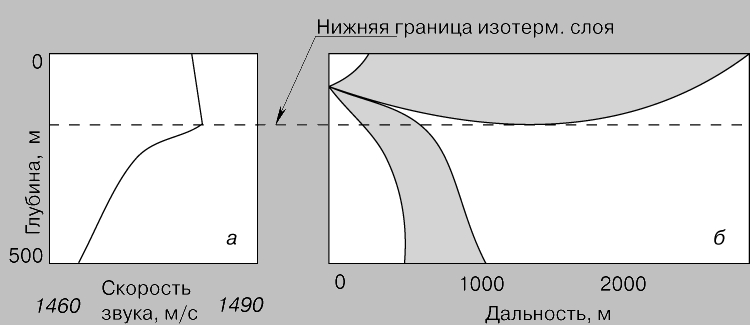
Рис. 4. РАСПРЕДЕЛЕНИЕ АКУСТИЧЕСКОГО ПОЛЯ гидролокатора, обусловленное рефракцией в изотермическом слое. а - профиль скорости звука; б - распределение акустического поля.
Поверхность с отрицательным градиентом. Когда нет условий для формирования изотермического слоя, температура воды падает с увеличением глубины, начиная с поверхности. Так обычно бывает во второй половине безветренного солнечного дня, когда поверхностный слой сильно прогревается, а перемешивания не происходит. В таких случаях весь звуковой пучок резко отклоняется вниз, и зона молчания начинается прямо с поверхности, причем она гораздо глуше, чем та, что образуется под изотермическим слоем, ибо здесь нет рассеяния из верхнего пучка.
Поверхность с положительным градиентом. Бывают ситуации, когда температура воды и скорость звука возрастают от поверхности вниз до некоторой глубины. Такие ситуации недолговременны и случаются после обильного холодного дождя или вблизи устьев рек. Тогда звуковой пучок в воде отклоняется к границе с воздухом, от которой и отражается, затем вновь рефрагирует и т.д., так что формируется звуковой канал большой протяженности.
Интенсивность эха. Интенсивность эхо-сигнала гидролокатора определяется расстоянием до цели, потерями на поглощение и рефракцию в среде, а также материалом цели и той ее площадью, на которую воздействует акустический импульс, причем характеристики цели учитываются квадратично, так как она является вторичным излучателем.
Шум. Шумы при гидролокации производят такой же эффект, как помехи при радиоприеме, поэтому любой нежелательный сигнал называют шумом. Дальность обнаружения цели гидролокатора зависит и от способности его оператора выделить слабый эхо-сигнал из шумового фона. Собственные шумы гидроакустической аппаратуры пренебрежимо малы, так что фон определяется шумами в водной среде, которые весьма ограничивают способность гидролокатора к обнаружению объектов. Реверберация, которая звучит на гидролокационных частотах как раскаты грома, возникает на неровностях поверхности воды и дна, а также на объемных неоднородностях в толще воды. Поверхностная реверберация порой заглушает полезные эхо-сигналы, поступающие с расстояния менее километра, особенно когда море неспокойно. Объемная реверберация в обычных условиях еле слышна. Донная реверберация зависит от расстояния до дна, поэтому в глубоких водах она может и не мешать, так как доходит до акустического приемника значительно позже полезного эха; ее интенсивность определяется породами и рельефом дна. Корабль, на борту которого находится гидролокатор, тоже шумит - своими винтами и самим своим движением в воде; чем выше скорость корабля, тем сильнее его шумы. Поэтому скорость надводных судов гидролокационной разведки до недавнего времени ограничивалась 20 узлами (1 узел = 1 морская миля в час = 1,852 км/ч). Посторонние шумы генерируются на различных частотах; в общий шумовой фон включаются многие отдаленные источники: волны, корабли и даже креветки. В итоге дальность действия гидролокатора в нормальных условиях не превышает нескольких километров. Зондирующий акустический пучок быстро слабеет; из-за поглощения, расходимости и рассеяния уменьшается его интенсивность, а его направленность ухудшается из-за отражения, рефракции и рассеяния.
Методы противодействия гидролокатору. Для того чтобы подводная лодка не могла быть обнаружена гидролокатором, ее конструируют и строят так, чтобы бортовые машины и механизмы издавали минимум шумов; корпус делается обтекаемой формы для уменьшения шумов, возникающих из-за его трения о воду; судно может двигаться на очень малых скоростях, при которых на его гребных винтах не возникает кавитация (на таких скоростях лодку обычно не слышит пассивный гидролокатор). Если корабль-разведчик не скрывает своего присутствия и включает активный гидролокатор, то подводной лодке спрятаться от него трудно, но иногда это удается. Проще всего лечь на дно в надежде на то, что эхо-сигнал от лодки затеряется среди множества донных отражений. Если лодка находится в глубоководном районе, то она может продолжать движение, погрузившись ниже термоклина (если таковой имеется; как правило, на беду судна-разведчика он существует, а под ним - обширная зона молчания, где гидролокатор бессилен). Если все эти меры предосторожности оказались напрасны и лодка обнаружена, то у ее капитана есть еще возможности ввести в заблуждение преследователя. Он может приказать выдуть в воду воздушные пузыри, которые сами становятся целью для гидролокатора, либо в качестве ложной цели выпустить акустический отражатель; наконец, он может включить электрические и механические генераторы шумов, чтобы заполнить весь экран индикатора кругового обзора шумами и тем затруднить определение точного местонахождения лодки.
ЛИТЕРАТУРА
Ольшевский В.М. Статистические методы в гидролокации. Л., 1983 Яковлев А.Н., Каблов Г.П. Гидролокаторы ближнего действия. Л., 1983 Голубков А.Г. Специализированные гидроакустические системы. Л., 1987 Бурдик В. Анализ гидроакустических систем. Л., 1988
Энциклопедия Кольера. — Открытое общество. 2000.