- Аэродинамика самолёта Боинг 737
-
Аэродинамика самолёта Боинг 737
Bóeing 737 (русск. Бо́инг 737) — самый популярный в мире узкофюзеляжный реактивный пассажирский самолёт. Boeing 737 является самым массовo производимым реактивным пассажирским самолётом за всю историю пассажирского авиастроения (6160 машин заказано и 5109 поставлено). Несмотря на это, фирма Боинг не опубликовала общедоступного документа, отражающего аэродинамические особенности своего детища. В статье предпринимается попытка осветить данный вопрос по аналогии, как это делалось на всех советских самолетах. Все написанное касается модификаций 300 - 500 (classic).
Особенности аэродинамической компоновки самолёта Боинг 737
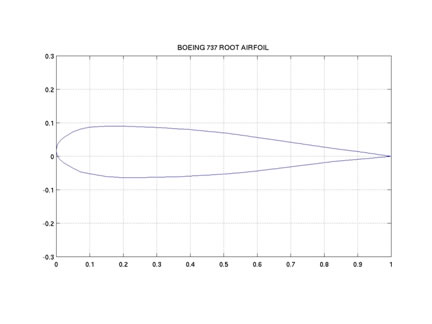
 Корневой профиль
Корневой профиль
Геометрические характеристики крыла
Профиль крыла самолёта Боинг 737-300, в отличие от других самолетов, не имеет номера NACA, потому что он создан в компании Boeing. Профиль 737—300 создан на основе раннего и менее эффективного профиля 737—200. Основные изменения на профиле произошли в контуре передней кромки, улучшены характеристики на больших скоростях и при полете в турбулентности. В корневой части крыла профиль почти симметричный, но по мере приближения к концу крыла профиль видоизменяется для улучшения ламинарности обтекания. Корневым профилям Boeing присвоил наименования BAC 449/450/451, а концевому профилю — BAC 442.
Корневой профиль
 Профиль на середине размаха крыла
Профиль на середине размаха крыла- Относительная толщина (отношение максимального расстояния между верхней и нижней дужкой профиля к длине хорды крыла) 0.1537
- Относительный радиус передней кромки (отношение радиуса к длине хорды) 0.0392
- Относительная кривизна (отношение максимального расстояния между средней линией профиля и хордой к длине хорды) 0.0028
- Угол задней кромки 14.2211 градусов
Профиль на середине размаха крыла
 Профиль крыла ближе к концевой части
Профиль крыла ближе к концевой части- Относительная толщина 0.1256
- Относительный радиус передней кромки 0.0212
- Относительная кривизна 0.0075
- Угол задней кромки 13.2757 градусов
Профиль крыла ближе к концевой части
 Профиль крыла концевой части
Профиль крыла концевой части- Относительная толщина 0.1000
- Оотносительный радиус передней кромки 0.0100
- Относительная кривизна 0.0145
- Угол задней кромки 11.2016 градусов
Профиль крыла концевой части
- Относительная толщина 0.1080
- Относительный радиус передней кромки 0.0117
- Относительная кривизна 0.0158
- Угол задней кромки 11.6657 градусов
Параметры крыла

- Площадь крыла 1135 ft² или 105.44м².
- Размах крыла 94’9’’ или 28.88 м (102’5’’ или 31.22 м с winglets)
- Относительное удлинение крыла 9.16
- Корневая хорда 7.32 %
- Концевая хорда 1.62 %
- Сужение крыла 0.24
- Угол стреловидности 25 градусов
Максимальное аэродинамическое качество самолета — 15.
Вертикальные законцовки крыла
Законцовки могут устанавливаться по желанию заказчика и благодаря их установке улучшаются следующие качества самолета:
- Взлетные характеристики, особенно в аэропортах, где максимальный взлетный вес ограничен препятствиями, высокой температурой, большим превышением аэродрома и/или ограничениями по шумам, благодаря более крутому набору высоты после отрыва.
- Продлевается жизнь двигателей и уменьшаются расходы на их обслуживание. Лучшие характеристики набора высоты позволяют уменьшать требуемый режим двигателей на взлете. Также улучшение аэродинамического качества уменьшает потребный режим двигателей в крейсерском полете (до 4 %).
- Экономия топлива. В крейсерском полете километровый расход топлива уменьшается на 6 %. Соответственно на ту же дальность можно перевезти больше груза.
- Самолет быстрее набирает крейсерский эшелон, где воздушное пространство менее загружено и есть возможность летать по спрямленным маршрутам.
Кроме очевидных достоинств законцовки имеют ряд недостатков:
- Дополнительный вес 170—235 кг.
- Несколько ухудшается боковая устойчивость, что приводит к дополнительным ограничениям бокового ветра на посадке.
- За счет смещения центра масс крыла назад уменьшается критическая скорость флаттера крыла. Это приводит к необходимости уменьшать нагрузки на крыло на больших скоростях, что обеспечивает система ограничения выпуска интерцепторов на V>320 узлов (Load Alleviation System).
Система управления самолетом
Управление самолетом делится на основное и вспомогательное.
Основное управление состоит из штурвала и педалей, механически соединенных с рулем высоты, рулем направления и элеронами.
К вспомогательному управлению относится механизация крыла и переставной стабилизатор.
Рулевые поверхности основного управления отклоняются гидроприводами, работу которых обеспечивают две независимые гидросистемы А и В. Любая из них обеспечивает нормальную работу основного управления. Рулевые приводы (гидроприводы) включены в проводку управления по необратимой схеме, т. е. аэродинамические нагрузки от рулевых поверхностей не передаются на органы управления. Усилия на штурвале и педалях создают загрузочные механизмы.
При отказе обеих гидросистем руль высоты и элероны управляются пилотами вручную, а руль направления управляется с помощью резервной гидросистемы (standby hydraulic system).
Поперечное управление
 Поперечное управление
Поперечное управлениеПоперечное управление осуществляется элеронами и отклоняемыми в полете интерцепторами (flight spoilers).
При наличии гидропитания на рулевых приводах элеронов поперечное управление работает следующим образом:
- перемещение штурвальных колес штурвалов по тросовой проводке передается на рулевые приводы элеронов и далее на элероны;
- кроме элеронов, рулевые приводы элеронов перемещают пружинную тягу (aileron spring cartridge), связанную с системой управления интерцепторами и таким образом приводят её в движение;
- движение пружинной тяги передается на устройство изменения передаточного коэффициента (spoiler ratio changer). Здесь управляющее воздействие уменьшается в зависимости от величины отклонения рукоятки управления интерцепторами (speed brake lever). Чем больше отклонены интерцепторы в режиме воздушных тормозов, тем меньше коэффициент передачи перемещения штурвалов по крену;
- далее перемещение передается на механизм управления интерцепторами (spoiler mixer), где оно суммируется с перемещением рукоятки управления интерцепторами. На крыле с поднятым элероном интерцепторы приподнимаются, а на другом крыле – приспускаются. Таким образом, одновременно выполняются функции воздушного тормоза и поперечного управления. Интерцепторы включаются в работу при повороте штурвального колеса более 10 градусов;
- также, вместе со всей системой, движется тросовая проводка от устройства изменения передаточного коэффициента до устройства зацепления (lost motion device) механизма связи штурвалов.
Устройство зацепления соединяет правый штурвал с тросовой проводкой управления интерцепторами при рассогласовании более 12 градусов (поворота штурвального колеса).
При отсутствии гидропитания на рулевых приводах элеронов, они будут отклоняться пилотами вручную, а при повороте штурвала на угол более 12 градусов будет приводиться в движение тросовая проводка системы управления интерцепторами. Если при этом рулевые машины интерцепторов будут работать, то интерцепторы будут работать в помощь элеронам.
Эта же схема позволяет второму пилоту управлять интерцепторами по крену при заклинении штурвала командира или тросовой проводки элеронов. При этом ему необходимо приложить усилие порядка 80-120 фунтов (36-54 кг), чтобы преодолеть усилие предварительной затяжки пружины в механизме связи штурвалов (aileron transfer mechanism), отклонить штурвал более 12 градусов и тогда вступят в работу интерцепторы.
При заклинении правого штурвала или тросовой проводки интерцепторов командир имеет возможность управлять элеронами, преодолевая усилие пружины в механизме связи штурвалов.
Рулевой привод элеронов соединен тросовой проводкой с левой штурвальной колонкой через загрузочный механизм (aileron feel and centering unit). Данное устройство имитирует аэродинамическую нагрузку на элеронах, при работающем рулевом приводе, а также смещает положение нулевых усилий (механизм триммерного эффекта). Пользоваться механизмом триммерного эффекта элеронов можно только при отключенном автопилоте, поскольку автопилот управляет рулевым приводом напрямую, и будет пересиливать любые перемещения загрузочного механизма. Зато в момент отключения автопилота эти усилия сразу же передадутся на проводку управления, что приведет к неожидаемому кренению самолета. Для уменьшения вероятности непреднамеренного триммирования элеронов, установлено два переключателя. При этом триммирование произойдет только при нажатии на оба переключателя одновременно.
Для уменьшения усилий при ручном управлении (manual reversion) элероны имеют кинематические сервокомпенсаторы (tabs) и балансировочные панели (balance panel).
Сервокомпенсаторы кинематически связаны с элеронами и отклоняются в противоположную отклонению элерона сторону. Это уменьшает шарнирный момент элерона и усилия на штурвале.
 Балансировочная панель
Балансировочная панельБалансировочные панели представляют собой панели соединяющие переднюю кромку элерона с задним лонжероном крыла с помощью шарнирных соединений. При отклонении элерона, например, вниз - на нижней поверхности крыла в зоне элерона возникает зона повышенного давления, а на верхней – разрежения. Этот перепад давления распространяется в зону между передней кромкой элерона и крылом и, воздействуя на балансировочную панель, уменьшает шарнирный момент элерона.
При отсутствии гидропитания рулевой привод работает как жесткая тяга. Механизм триммерного эффекта реального уменьшения усилий не обеспечивает. Триммировать усилия на рулевой колонке можно с помощью руля направления или, в крайнем случае, разнотягом двигателей.
Управление по тангажу
Управляющими поверхностями продольного управления являются: руль высоты, обеспеченный гидравлическим рулевым приводом, и стабилизатор, обеспеченный электрическим приводом. Штурвалы пилотов связаны с гидравлическими приводами руля высоты с помощью тросовой проводки. Кроме этого, на вход гидроприводов воздействует автопилот и система триммирования по числу М.
Нормальное управление стабилизатором осуществляется от переключателей на штурвалах или автопилотом.Резервное управление стабилизатором - механическое с помощью колеса управления на центральном пульте управления.
Две половины руля высоты механически соединены между собой с помощью трубы. Гидроприводы руля высоты питаются от гидросистем А и В. Подачей гидрожидкости к приводам управляют переключатели в кабине пилотов (Flight Control Switches).
Одной работающей гидросистемы достаточно для нормальной работы руля высоты. В случае отказа обоих гидросистем (manual reversion) руль высоты отклоняется вручную от любого из штурвалов. Для уменьшения шарнирного момента руль высоты оснащен двумя аэродинамическими сервокомпенсаторами и шестью балансировочными панелями.
Наличие балансировочных панелей приводит к необходимости установки стабилизатора полностью на пикирование (0 units) перед обливом против обледенения. Такая установка предотвращает попадание слякоти и противообледенительной жидкости в вентиляционные отверстия балансировочных панелей (см. балансировочные панели элеронов).
Шарнирный момент руля высоты,при работающем гидроприводе, на штурвал не передается, а усилия на штурвале создаются с помощью пружины механизма триммерного эффекта (feel and centering unit) на который, в свою очередь, передаются усилия от гидравлического имитатора аэродинамической нагрузки (elevator feel computer).
 Механизм триммерного эффекта
Механизм триммерного эффектаПри отклонении штурвала поворачивается центрирующий кулачок и подпружиненный ролик выходит из своей «ямки» на боковую поверхность кулачка. Стремясь под действием пружины вернуться обратно, он создает усилие в поводке управления, препятствующее отклонению штурвала. Кроме пружины на ролик воздействует исполнительный механизм имитатора аэродинамической нагрузки (elevator feel computer). Чем больше скорость, тем сильнее ролик будет прижиматься к кулачку, что будет имитировать возрастание скоростного напора.
Особенностью двухпоршневого цилиндра является то, что он воздействует на feel and centering unit максимальным из двух командных давлений. Это легко понять по рисунку, поскольку между поршнями давления нет, и цилиндр будет находиться в нарисованном состоянии только при одинаковых командных давлениях. Если же одно из давлений станет больше, то цилиндр сместится в сторону большего давления, пока один из поршней не упрется в механическую преграду, исключив, таким образом, цилиндр с меньшим давлением из работы.
 Имитатор аэродинамической нагрузки
Имитатор аэродинамической нагрузкиНа вход elevator feel computer поступает скорость полета (от приемников воздушного давления, установленных на киле) и положение стабилизатора.
Под действием разности полного и статического давлений мембрана прогибается вниз, смещая золотник командного давления. Чем больше скорость, тем больше командное давление.
Изменение положения стабилизатора передается на кулачок стабилизатора, который через пружину воздействует на золотник командного давления. Чем больше стабилизатор отклонен на кабрирование, тем меньше командное давление.
Предохранительный клапан срабатывает при избыточном командном давлении.
Таким образом гидравлическое давление из гидросистем А и В (210 атм.) преобразуется в соответствующее командное давление (от 14 до 150 атм.), воздействующее на feel and centering unit.
Если разница в командных давлениях становится более допустимой, пилотам выдается сигнал FEEL DIFF PRESS, при убранных закрылках. Эта ситуация возможна при отказе одной из гидросистем или одной из веток приемников воздушного давления. Никаких действий от экипажа не требуется поскольку система продолжает нормально функционировать.
Система улучшения устойчивости по скорости (Mach Trim System)
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS). Система MACH TRIM обеспечивает устойчивость по скорости при числе М более 0,615. При увеличении числа М электромеханизм MACH TRIM ACTUATOR смещает нейтраль механизма триммерного эффекта (feel and centering unit) и руль высоты автоматически отклоняется на кабрирование, компенсируя пикирующий момент от смещения аэродинамического фокуса вперед. При этом на штурвал никакие перемещения не передаются. Подключение и отключение системы происходит автоматически в функции числа М.
Система получает число М от Air Data Computer. Система двухканальная. При отказе одного канала индицируется MACH TRIM FAIL при нажатии Master Caution и гаснет после Reset. При двойном отказе система не работает и сигнал не гасится, необходимо выдерживать число М не более 0.74.
Стабилизатор управляется электродвигателями триммирования: ручного и автопилота, а также механически, с помощью колеса управления. На случай заклинивания электродвигателя предусмотрена муфта, разъединяющая трансмиссию от электродвигателей при приложении усилий к колесу управления.
 Управление стабилизатором
Управление стабилизатором
Управление электродвигателем ручного триммирования выполняется от нажимных переключателей на штурвалах пилотов, при этом при выпущенных закрылках стабилизатор перекладывается с большей скоростью, чем при убранных. Нажатие этих переключателей приводит к отключению автопилота.Система улучшения устойчивости по скорости (Speed Trim System)
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS). Система управляет стабилизатором с помощью сервопривода автопилота для обеспечения устойчивости по скорости. Её срабатывание возможно вскоре после взлета или при уходе на второй круг. Условиями, способствующими срабатыванию, являются малый вес, задняя центровка и высокий режим работы двигателей.
Система улучшения устойчивости по скорости работает на скоростях 90 – 250 узлов. Если компьютер улавливает изменение скорости, то система автоматически включается при отключенном автопилоте, выпущенных закрылках (на 400/500 независимо от закрылков), оборотах двигателей N1 более 60%. При этом должно пройти более 5 секунд после предыдущего ручного триммирования и не менее 10 секунд после отрыва от ВПП.
Принцип работы заключается в перекладывании стабилизатора в зависимости от изменения скорости самолета, таким образом, чтобы при разгоне самолет имел тенденцию к задиранию носа и наоборот. (При разгоне 90 – 250 узлов стабилизатор автоматически перекладывается на 8 градусов на кабрирование). Кроме изменений скорости компьютер учитывает обороты двигателей, вертикальную скорость и приближение к сваливанию.
Чем выше режим двигателей, тем быстрее начнет срабатывать система. Чем больше вертикальная скорость набора высоты, тем больше стабилизатор отрабатывает на пикирование. При приближении к углам сваливания система автоматически отключается.
Система двухканальная. При отказе одного канала полет разрешается. При двойном отказе вылетать нельзя. Если двойной отказ произошел в полете, QRH не требует никаких действий, но логично было бы повысить контроль за скоростью на этапах захода на посадку и ухода на второй круг.
Путевое управление
Путевое управление самолетом обеспечивается рулем направления. На руле отсутствует сервокомпенсатор. Отклонение руля обеспечивается с помощью одного главного рулевого привода и резервного рулевого привода. Главный рулевой привод работает от гидросистем А и В, а резервный от третьей (standby) гидросистемы. Работа любой из трех гидросистем полностью обеспечивает путевое управление.
Триммирование руля направления с помощью ручки на центральном пульте осуществляется смещением нейтрали механизма триммерного эффекта.
На самолетах серии 300-500 производилась модификация схемы управления рулем направления (RSEP modification). RSEP –Rudder System Enhancement Program.
Внешний признак выполнения данной модификации – дополнительное табло «STBY RUD ON» в левом верхнем углу панели FLIGHT CONTROL.
Путевое управление осуществляется педалями. Их перемещение передается тросовой проводкой на трубу, которая, вращаясь, перемещает тяги управления главного и резервного рулевых приводов. К этой же трубе прикреплен механизм триммерного эффекта.
Механизация крыла
 Механизация крыла и рулевые поверхности
Механизация крыла и рулевые поверхностиМеханизация крыла состоит из механизации передней кромки (en:leading edge devices), закрылков и интерцепторов.
Механизация передней кромки состоит из 4-х секционных отклоняемых предкрылков Крюгера (flaps) и 6-ти секционных выдвижных щелевых предкрылков (en:slats). По две секции предкрылков Крюгера расположены между фюзеляжем и мотогондолой и по 3 секции выдвижных предкрылков на оставшейся части передней кромки крыла. Предкрылки Крюгера (Krueger flaps) отклоняются поворотом части передней кромки вперед-вниз и не имеют промежуточных положений в процессе выпуска.
Выдвижные предкрылки выпускаются перемещением части передней кромки вперед с образованием щели и имеют два фиксированных выпущенных положения (EXTEND) и (FULL EXTEND).
Закрылки 4-х секционные щелевые. Имеют фиксированные углы выпуска 1, 2, 5 ,10, 15, 25 , 30 и 40 градусов.
Интерцепторы 10-ти секционные. Из них 6 секций (Ground spoilers) отклоняются только на земле для уменьшения длины пробега или прерванного взлета. Четыре секции (Flight spoilers) используются все время для управления по крену и коррекции траектории полета.
Предкрылки и закрылки при выпуске значительно увеличивают подъемную силу крыла за счет увеличения длины хорды и кривизны профиля, таким образом, уменьшая скорость захода на посадку и увеличивая маневренные возможности самолета. Выпуск закрылков до 15° увеличивает подъемную силу при относительно малом увеличении сопротивления, при дальнейшем выпуске закрылков сопротивление возрастает значительно быстрее роста подъемной силы.
Система автоматического довыпуска выдвижных предкрылков (auto slat system) улучшает характеристики самолета на больших углах атаки на взлете и заходе на посадку. При отклоненных закрылках на угол 1 — 5 градусов выдвижные предкрылки находятся в промежуточном (EXTEND) положении. Когда угол атаки крыла приближается к сваливанию, выдвижные предкрылки автоматически довыпускаются полностью (FULL EXTEND) прежде, чем сработает предупреждающая тряска штурвала. После уменьшения угла атаки предкрылки возвращаются в исходное положение.
Силовая установка
Боинг 737 (300—500) оснащен двигателем CFM 56-3, который имеет 4 модификации: В4, В1, В2 и С1 имеющие максимальную статическую тягу соответственно 18,5; 20; 22 и 23,5 тысяч фунтов (1 фунт равен 0.4536 кг) тяги.
Система управления двигателем
 Закон управления МЕС
Закон управления МЕС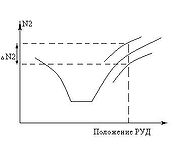 Реакция МЕС на изменяющиеся условия
Реакция МЕС на изменяющиеся условияСистема управления подачей топлива совместно с системами управления поворотными лопатками направляющих аппаратов компрессора и перепускных клапанов компрессора регулирует тягу двигателя во всех условиях.
Гидромеханический регулятор расхода топлива (main engine control (MEC)) устанавливает заданную тягу двигателя, используя в качестве входных сигналов:
- Положение РУД (thrust lever);
- Температуру воздуха на входе в компрессор (compressor inlet temperature(CIT));
- Давление воздуха на выходе из компрессора (compressor discharge pressure (CDP));
- Сигналы обратной связи систем управления поворотными лопатками направляющих аппаратов и перепускных клапанов;
- Обороты ротора высокого давления (N2)
- Команды электронного блока управления двигателем (power management control (PMC)).
MEC управляет оборотами КВД (N2) в зависимости от положения РУД. При этом автоматически регулируется положение направляющих аппаратов компрессора и перепускных клапанов.
Обороты N2 регулируются не жестко, а с возможностью уточнения в зависимости от условий полета.
Электронный блок управления двигателем (РМС) управляет оборотами КНД (N1) посредством исполнительного агрегата МЕС. При этом выполняются следующие функции:
- В функции от положения РУД рассчитываются откорректированные обороты N1 в виде процентного соотношения от максимальных откорректированных оборотов для текущих условий.
 Откорректрованные N1 по предельной температуре газов
Откорректрованные N1 по предельной температуре газов - N1 рассчитываются и поддерживаются для поддержания постоянной тяги двигателя.
- Рассчитываются и поддерживаются откорректированные обороты N1 из условия не превышения максимально-допустимой температуры газов за турбиной.
- Рассчитываются и поддерживаются откорректированные обороты N1 из условия поддержания требуемого уровня высотной компенсации.
- Обеспечивается автоматическое отключение при отказе.
Положение РУД определяет заданную тягу двигателя, которую РМС выдерживает как заданное процентное отношение к полной тяге для текущих условий полета. При этом РМС обеспечивает защиту от превышения оборотов КНД (N1) и КВД (N2) и от забросов температуры газов (EGT) на переходных процессах.
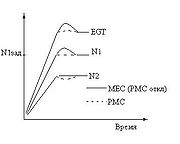 Переходный процесс двигателя
Переходный процесс двигателяНа рисунке показан характер переходных процессов двигателя с выключенным и работающим РМС.
Таким образом, при работающем РМС положение РУД определяет заданный N1. Поэтому в процессе взлета и набора высоты тяга двигателя будет оставаться постоянной, при неизменном положении РУД.
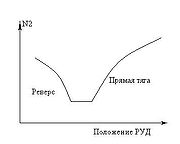
Особенности управления двигателями при выключенном РМС
При выключенном РМС, МЕС выдерживает заданные обороты N2, и в процессе роста скорости на взлете обороты N1 будут возрастать. В зависимости от условий рост N1 может составить до 7 %. От пилотов не требуется уменьшать режим в процессе взлета, если не будут превышаться ограничения по двигателю.
При выборе режима двигателям на взлете, при выключенном РМС, нельзя использовать технологию имитации температуры наружного воздуха (assumed temperature).
В наборе высоты после взлета необходимо следить за оборотами N1 и своевременно корректировать их рост приборкой РУД.
Автомат тяги
Автомат тяги — это управляемая компьютером электромеханическая система, которая управляет тягой двигателей. Автомат перемещает РУДы так, чтобы поддерживать заданные обороты N1 или заданную скорость полета в течение всего полета от взлета до касания ВПП. Он рассчитан для работы совместно с автопилотом и навигационным компьютером (FMS, Flight Management System).
Автомат тяги имеет следующие режимы работы: взлет (TAKEOFF); набор высоты (CLIMB); занятие заданной высоты (ALT ACQ); крейсерский полет (CRUISE); снижение (DESCENT); заход на посадку (APPROACH); уход на второй круг (GO-AROUND).
FMC передает на автомат тяги информацию о требуемом режиме работы, заданных оборотах N1, оборотах максимально продолжительного режима работы двигателя, максимальных оборотов для набора высоты, крейсерского полета и ухода на второй круг, а также другую информацию.
Особенности работы автомата тяги при отказе FMC
В случае отказа FMC компьютер автомата тяги рассчитывает собственные предельные обороты N1 и индицирует пилотам сигнал «A/T LIM». Если автомат тяги в этот момент будет работать в режиме взлета, то произойдет его автоматическое отключение с индикацией отказа «A/T».
Рассчитанные автоматом обороты N1 могут быть в пределах (+0 % −1 %) от рассчитанных FMC оборотов набора высоты (FMC climb N1 limits).
В режиме ухода на второй круг, рассчитанные автоматом обороты N1, обеспечивают более плавный переход от захода на посадку к набору высоты и рассчитываются из условий обеспечения положительного градиента набора высоты.
Особенности работы автомата тяги при неработающем РМС
При неработающем РМС положение РУД уже не соответствует заданным оборотам N1 и, чтобы не допустить заброса оборотов, автомат тяги уменьшает передний предел отклонения РУД с 60 до 55 градусов.
Скорость полета
Номенклатура скоростей, используемых в руководствах Боинг:
- Приборная скорость (Indicated или IAS) - показание указателя воздушной скорости без учёта поправок.
- Индикаторная земная скорость (Calibrated или CAS). Индикаторная земная скорость равна приборной скорости, в которую внесены аэродинамическая и инструментальная поправки.
- Индикаторная скорость (Equivalent или EAS). Индикаторная скорость равна индикаторной земной скорости, в которую внесена поправка на сжимаемость воздуха.
- Истинная скорость (True или TAS). Истинная скорость равна индикаторной скорости, в которую внесена поправка на плотность воздуха.
Пояснения к скоростям начнем в обратном порядке. Истинная скорость самолета – это его скорость относительно воздуха. Измерение воздушной скорости на самолете осуществляется с помощью приемников воздушного давления (ПВД). В них замеряется полное давление заторможенного потока p * (pitot) и статическое давление p (static). Предположим, что ПВД на самолете – идеальное и не вносит никаких погрешностей и, что воздух несжимаем. Тогда прибор, измеряющий разность полученных давлений, измерит скоростной напор воздуха p * − p = ρ * V2 / 2. Скоростной напор зависит как от истинной скорости V, так и от плотности воздуха ρ. Поскольку градуировка шкалы прибора производится в земных условиях при стандартной плотности, то в этих условиях прибор будет показывать истинную скорость. Во всех остальных случаях прибор будет показывать отвлечённую величину, называемую индикаторной скоростью
 .
.Индикаторная скорость Vi играет важную роль не только как величина, необходимая для определения воздушной скорости. В горизонтальном установившемся полете при заданной массе самолета она однозначно определяет его угол атаки и коэффициент подъемной силы.
Учитывая, что при скоростях полета более 100 км/час начинает проявляться сжимаемость воздуха, реальная разница давлений, замеренная прибором, будет несколько больше. Данная величина будет называться земной индикаторной скоростью Vi3 (calibrated). Разность Vi − Vi3 называется поправкой на сжимаемость и увеличивается по мере роста высоты и скорости полета.
Летящий самолет искажает статическое давление вокруг себя. В зависимости от точки установки приемника давления прибор будет замерять несколько разные статические давления. Полное давление практически не искажается. Поправка на расположение точки замера статического давления называется аэродинамической (correction for static source position). Также возможна инструментальная поправка на отличие данного прибора от стандарта (у Боинга принята равной нулю). Таким образом, величина, показанная реальным прибором, подключенным к реальному ПВД, называется приборной скоростью (indicated).
На совмещенных указателях скорости и числа М индицируется земная индикаторная (calibrated) скорость от компьютера высотно-скоростных параметров (Air data computer). На комбинированном указателе скорости и высоты индицируется приборная (indicated) скорость, полученная по давлениям, взятым непосредственно из ПВД.
Рассмотрим типичные неисправности, связанные с ПВД. Обычно экипаж распознает проблемы в процессе взлета или вскоре после отрыва от земли. В большинстве случаев это проблемы, связанные с замерзанием воды в трубопроводах.
В случае закупорки трубопровода полного давления (pitot probes) указатель скорости не покажет увеличения скорости в процессе разбега на взлете. Однако после отрыва скорость начнет расти, поскольку статическое давление будет уменьшаться. Высотомеры будут работать практически правильно. При дальнейшем наборе скорость будет расти через правильное значение и далее превысит ограничение с соответствующим срабатыванием сигнализации (overspeed warning). Сложность данного отказа в том, что какое-то время приборы будут показывать практически нормальные показания, что может вызвать иллюзию восстановления нормальной работы системы.
В случае закупорки трубопровода статического давления (static ports) в процессе разбега система будет работать нормально, но в процессе набора высоты покажет резкое уменьшение скорости вплоть до нуля. Показания высотомеров останутся на высоте аэродрома. Если пилоты пытаются сохранить требуемые показания скорости путем уменьшения тангажа в наборе высоты, то, как правило, это заканчивается выходом за ограничения по максимальной скорости.
Кроме случаев полной закупорки возможна частичная закупорка или разгерметизация трубопроводов. При этом распознать отказ может быть значительно сложнее. Ключевым моментом является распознание систем и приборов, не затронутых отказом и завершение полета с их помощью. Если есть индикация угла атаки – пилотировать внутри зеленого сектора, если нет – установить тангаж и обороты двигателей N1 в соответствие с режимом полета по таблицам Unrelaible airspeed в QRH. По возможности выйти из облаков. Попросить помощь у службы движения, учитывая, что они могут иметь неправильную информацию о вашей высоте полета. Не доверять приборам, показания которых были под подозрением, но в данный момент, кажется, работают правильно.
Как правило, надежная информация в этом случае: инерциальная система (положение в пространстве и путевая скорость), обороты двигателей, радиовысотомер, срабатывание stick shaker (приближение к сваливанию), срабатывание EGPWS (опасное сближение с землей).

На графике показана потребная тяга двигателя (сила сопротивления самолета) в горизонтальном полете на уровне моря в стандартной атмосфере. Тяга указана в тысячах фунтов, а скорость – в узлах.
Взлет самолета
Траектория взлета простирается от точки старта до набора высоты 1500 футов, или окончания уборки закрылков с достижением скорости VFTO (final takeoff speed), какая из этих точек выше.
Максимальный взлетный вес самолета ограничивается следующими условиями:
- Максимально-допустимой энергией, поглощаемой тормозами, в случае прерванного взлета.
- Минимально-допустимым градиентом набора высоты.
- Максимально-допустимым временем работы двигателя на взлетном режиме (5 минут), в случае продолженного взлета для набора необходимой высоты и разгона для уборки механизации.
- Располагаемой дистанцией взлета.
- Максимально-допустимой сертифицированной взлетной массой.
- Минимально-допустимой высотой пролета над препятствиями.
- Максимально-допустимой путевой скоростью отрыва от ВПП (по прочности пневматиков). Обычно 225 узлов, но возможно 195 узлов. Эта скорость написана прямо на пневматиках.
- Минимальной эволютивной скоростью разбега; VMCG (minimum control speed on the ground)
Минимально-допустимый градиент набора высоты
В соответствии с нормами летной годности FAR 25 (Federal Aviation Regulations) градиент нормируется по трем сегментам:
- С выпущенными шасси, закрылки во взлетном положении — градиент должен быть более нуля.
- После уборки шасси, закрылки во взлетном положении — минимальный градиент 2,4 %. Взлетный вес ограничивается, как правило, выполнением данного требования.
- В крейсерской конфигурации — минимальный градиент 1,2 %.
Дистанция взлета
В располагаемую дистанцию взлета (takeoff field length) входит рабочая длина взлетно-посадочной полосы с учетом концевой полосы безопасности (Stopway) и полосы, свободной от препятствий (Clearway).
Располагаемая дистанция взлета не может быть меньше любой из трех дистанций:
- Дистанции продолженного взлета от начала движения до набора высоты условного препятствия (screen height) 35 футов и безопасной скорости V2 при отказе двигателя на скорости принятия решения V1.
- Дистанции прерванного взлета, при отказе двигателя на VEF. Где VEF (engine failure) — скорость в момент отказа двигателя, при этом предполагается, что пилот распознает отказ и выполнит первое действие по прекращению взлета на скорости принятия решения V1. На сухой ВПП не учитывается влияние реверса работающего двигателя.
- Дистанции взлета с нормально работающими двигателями от начала движения до набора высоты условного препятствия 35 футов, умноженной на коэффициент 1,15.
В располагаемую дистанцию взлета входят рабочая длина ВПП и длина концевой полосы безопасности (Stopway).
Длину полосы, свободной от препятствий (Clearway), разрешается прибавлять к располагаемой дистанции взлета, но не более половины воздушного участка траектории взлета от точки отрыва до набора высоты 35 футов и безопасной скорости.
Если мы прибавляем к длине ВПП длину КБП, то мы можем увеличить взлетный вес, при этом скорость принятия решения увеличится, для обеспечения набора высоты 35 футов над концом КБП.
Если мы используем полосу свободную от препятствий, то мы также можем увеличить взлетный вес, но при этом скорость принятия решения уменьшится, поскольку нам необходимо обеспечить остановку самолета в случае прерванного взлета с увеличенным весом в пределах рабочей длины ВПП. В случае продолженного взлета в этом случае самолет наберет высоту 35 футов за пределами ВПП, но над полосой, свободной от препятствий.
Минимально-допустимая высота пролета над препятствиями
Минимально-допустимая высота пролета над препятствиями по «чистой» (net) траектории взлета равна 35 футов.
«Чистая» — это траектория взлета, градиент набора высоты которой уменьшен на 0,8 % по сравнению с реальным градиентом для данных условий.
При построении схемы стандартного выхода из района аэродрома после взлета (SID) закладывается минимальный градиент «чистой» траектории 2,5 %. Таким образом, чтобы выполнить схему выхода, максимальный взлетный вес самолета должен обеспечить градиент набора высоты 2,5 +0,8 = 3,3 %. Некоторые схемы выхода могут требовать более высокого градиента, что требует уменьшения взлетного веса.
Минимальная эволютивная скорость разбега
Это земная индикаторная скорость в ходе разбега, при которой в случае внезапного отказа критического двигателя, возможно сохранять управление самолетом, используя только руль направления (без использования управления передним колесом шасси) и сохранять поперечное управление в такой степени, чтобы удерживать крыло в близком к горизонтальному положении для обеспечения безопасного продолжения взлета. VMCG не зависит от состояния ВПП, поскольку при ее определении не учитывается реакция ВПП на самолет.
В таблице представлена VMCG в узлах для взлета с двигателями с тягой 22К. Где Actual OAT- температура наружного воздуха, а Press ALT- превышение аэродрома в футах. Приписка снизу касается взлета с выключенными отборами воздуха от двигателей (no engine bleeds takeoff), поскольку тяга двигателей возрастает, то возрастает и VMCG.
Actual OAT Press ALT C 0 2000 4000 6000 8000 40 111 107 103 99 94 30 116 111 107 103 99 20 116 113 111 107 102 10 116 113 111 108 104 For A/C OFF increase V1(MCG) by 2 knots.
Взлет с отказавшим двигателем может быть продолжен лишь в случае, если отказ двигателя произойдет при скорости не менее, чем VMCG.
Взлет с мокрой полосы
При расчете максимально-допустимой взлетной массы, в случае продолженного взлета, используется уменьшенная высота условного препятствия (screen height) 15 футов, вместо 35 футов для сухой ВПП. В связи с этим нельзя в расчет взлетной дистанции включать полосу, свободную от препятствий(Clearway).
При расчетах прерванного взлета разрешается учитывать эффект реверса двигателей.
Взлет с полосы, покрытой слоем осадков (contaminated)
На взлет с ВПП, покрытой слоем осадков (вода, снег, слякоть), накладывается ряд ограничений:
- Запрещается использовать технологию увеличения градиента набора высоты (improved climb).
- Запрещается уменьшать режим работы двигателя на взлете, используя технологию имитации температуры наружного воздуха (assumed temperature).
- Антиюз (Antiskid) должен быть включен и исправен.
Взлет самолета с использованием неполной взлетной тяги двигателя
В условиях, когда максимально-допустимый взлетный вес значительно превышает фактический, рекомендуется выполнять взлет с неполной взлетной тягой двигателей. Это позволяет повысить надежность работы двигателей, экономить расходы по эксплуатации двигателей, создает меньше шума, способствует комфорту пассажиров за счет более плавного изменения параметров полета, особенно если вскоре после взлета придется переходить в горизонтальный полет. Особенно это желательно делать при взлетах в жаркую погоду, поскольку резко уменьшается вероятность превышения максимально допустимой температуры газов за турбиной (930 °C) в процессе разгона на взлете.
Существует два способа уменьшения тяги:
- ступенчатый перевод двигателя на нижнюю ступень тяги (derate). CFM 56-3 имеет 4 модификации: В4, В1, В2 и С1 имеющие максимальную статическую тягу соответственно 18,5; 20; 22 и 23,5 тысяч фунтов. Так, если на модификации С1 установить Derate 1, FMC будет строить расчеты на максимальную тягу 22 тысячи фунтов, а если Derate 2 — то 20 тысяч.
- имитация температуры наружного воздуха (assumed temperature).
Общеизвестно, что с увеличением температуры воздуха максимально-допустимая взлетная масса уменьшается. Это связано в первую очередь с уменьшением располагаемой тяги двигателей. Как и в любой тепловой машине, в реактивном двигателе мощность напрямую зависит от количества тепла переданного рабочему телу (воздуху). Верхний предел температуры газов ограничен прочностью турбины, поэтому при повышении температуры воздуха, входящего в двигатель, разница температур (а значит и мощность) падает.
Кроме этого, при увеличении температуры воздуха падает его плотность, что приводит к увеличению скоростей на взлете и, следовательно, уменьшению допустимого взлетного веса при неизменных параметрах аэродрома вылета.
Метод имитации температуры наружного воздуха состоит в том, чтобы задать FMC такую температуру, при которой фактический взлетный вес являлся бы максимально-допустимым (для всех остальных фактических условий: ВПП, препятствия и т. д.).
 Метод имитации температуры наружного воздуха
Метод имитации температуры наружного воздухаПрименение данного метода имеет ряд ограничений. Согласно нормам, нельзя уменьшать тягу данным методом более, чем на 25 %. Использование данного метода запрещено, при:
- Взлете с ВПП, покрытой слоем осадков (contaminated RW).
- Взлете с попутным ветром.
- Взлете с выключенными РМС.
- При неработающей FMC.
- При ожидаемом сдвиге ветра на взлете.
- При отказе антиюза
Оба метода уменьшения взлетной тяги не противоречат друг другу и их можно применять одновременно. Вместе с тем есть принципиальное отличие по их влиянию на взлетные характеристики.
При использовании Derate новый установленный максимум тяги нельзя превышать (как будто у вас стоит менее мощный двигатель). В напоминание об этом на индикаторе оборотов N1 опустятся ограничители (bugs).
При использовании assumed temperature пилоты могут в любой момент увеличить тягу до максимальной.
Исходя из этого строится расчет VMCG. Соответственно при использовании assumed temperature — VMCG не меняется, а при использовании Derate — уменьшается за счет уменьшения разворачивающего момента от двигателя, выдающего меньшую тягу.
Данное свойство Derate может помочь в увеличении максимально-допустимой взлетной массы при взлетах с коротких ВПП и с ВПП, покрытых слоем осадков. Это происходит потому, что вес в данном случае ограничивается необходимостью на взлете достичь VMCG , а затем при необходимости остановиться в пределах ВПП.
Посадка самолета
Максимально допустимый посадочный вес определяется на основании располагаемой длины ВПП, соблюдении требований к градиентам набора высоты в конфигурации захода на посадку (approach climb) и в посадочной конфигурации (landing climb).
Также он не может быть больше максимального сертифицированного посадочного веса.
Потребная длина ВПП
Исходной точкой в определении потребной длины ВПП выступают продемонстрированные в летных испытаниях посадочные дистанции. Эти дистанции замеряются с высоты 50 футов над ВПП, применяется выравнивание без «добора» (касание ВПП 305 метров от торца), максимальное использование возможностей тормозов и интерцепторов. Испытания проводятся на сухой ВПП без применения реверса тяги.
Полученные данные (unfactored distances) публикуются в руководстве по летной эксплуатации вместе с поправочными добавками на изменение веса, высоты аэродрома, ветер и т.д.
Согласно нормам длина сухой ВПП для посадки не может быть меньше опубликованной посадочной дистанции (со всеми добавками), умноженной на коэффициент безопасности 1,67.
Для мокрой ВПП полученный результат увеличивают еще на 15%, т. е. коэффициент безопасности равен 1,67 * 1,15 = 1,92.
Ограничения по градиенту набора высоты
Соблюдение этих ограничений необходимо для обеспечения безопасного набора высоты в случае ухода на второй круг.
Градиент набора высоты в конфигурации захода на посадку (approach climb) должен быть не менее 2,1% для захода по первой категории и не менее 2,5% при высоте принятия решения менее 200 футов. Он замеряется при закрылках, выпущенных на 5°, убранных шасси и одном работающем двигателе на режиме ухода на второй круг.
Градиент набора высоты в посадочной конфигурации (landing climb) должен быть не менее 3,2%. Он замеряется при посадочных закрылках, выпущенных шасси и обоих работающих двигателях на режиме, на который двигатели успеют выйти с режима малого газа на 8-ой секунде, после установки пилотом РУД в положение ухода на второй круг.
Для Боинга 737 более критичным является первое ограничение (approach climb).
Гидропланирование
На определенной скорости, называемой скоростью гидропланирования (VP), самолет, движущийся по мокрой ВПП, давлением воды на пневматики приподнимается над ВПП. При этом самолет теряет возможность управляться и тормозиться с помощью колес. Скорость VP зависит от давления воздуха в пневматиках. Испытания показали, что минимальная
 , где Tp — давление в пневматиках в фунтах на квадратный дюйм (PSI).
, где Tp — давление в пневматиках в фунтах на квадратный дюйм (PSI).Для справки 1 PSI = 0,07 кг/см².
Серии с-та Основные стойки, PSI Vp, узел Носовая стойка Vp, узел 100 — 200 96 — 183 84 — 116 125 — 145 96 — 104 300 — 500 185 — 217 118 — 128 163 — 194 111 — 121 600 — 900 117 — 205 93 — 123 123 — 208 95 — 124 Устойчивость и управляемость
 Поперечная устойчивость
Поперечная устойчивостьБоковая устойчивость и управляемость
Боинг 737 имеет излишнюю степень поперечной статической устойчивости (
 ), особенно с отклоненной механизацией крыла.
), особенно с отклоненной механизацией крыла.Поперечной устойчивостью самолета называется его способность крениться в сторону, обратную скольжению. Основную роль в создании кренящего момента играет стреловидное крыло: при возникновении скольжения у выдвинутого вперед полукрыла угол стреловидности как бы уменьшится на величину угла скольжения, а у отстающего увеличится на такую же величину.
Такое изменение углов стреловидности полукрыльев приведет к изменению их несущих свойств так, что у выдвинутого вперед полукрыла увеличится коэффициент подъемной силы, а у отстающего — уменьшится. Возникнет кренящий момент в сторону, обратную скольжению. Возникающий момент частично компенсируется, возникающим при вращении, демпфирующим моментом крена (
 ), но все равно вызывает энергичное кренение.
), но все равно вызывает энергичное кренение.Таким образом, самолет чрезмерно реагирует креном на боковые порывы ветра, что усложняет пилотирование в условиях порывистого бокового ветра.
Демпфер рыскания (en:Yaw damper)
Для улучшения характеристик бокового движения самолета и недопущения незатухающих колебаний типа «голландский шаг» в системе управления рулем направления установлен демпфер рыскания.
«Голландский шаг» (en:Dutch roll) появляется в результате относительно слабой путевой устойчивости и чрезмерной поперечной устойчивости самолета.
Когда самолет вращается относительно продольной оси, самопроизвольно возникает скольжение в сторону опускающегося крыла, за счет возникающей боковой составляющей силы тяжести. Это сразу же приводит к возникновению момента поперечной устойчивости
 , который стремится уменьшить возникший крен. На самолетах с высокой поперечной устойчивостью он может быть значительным. В то же время возникает и момент путевой устойчивости
, который стремится уменьшить возникший крен. На самолетах с высокой поперечной устойчивостью он может быть значительным. В то же время возникает и момент путевой устойчивости  , стремящийся развернуть нос самолета в сторону возникшего скольжения. Поскольку на многих самолетах путевая устойчивость значительно слабее поперечной, то восстановление скольжения отстает от восстановления крена. Самолет по инерции проскакивает положение без крена и начинает крениться в противоположную сторону. Таким образом, самолет, без вмешательства в управление, будет совершать незатухающие колебания по крену и скольжению.
, стремящийся развернуть нос самолета в сторону возникшего скольжения. Поскольку на многих самолетах путевая устойчивость значительно слабее поперечной, то восстановление скольжения отстает от восстановления крена. Самолет по инерции проскакивает положение без крена и начинает крениться в противоположную сторону. Таким образом, самолет, без вмешательства в управление, будет совершать незатухающие колебания по крену и скольжению.Демпфер рыскания искусственно увеличивает путевую устойчивость и таким образом предотвращает колебания.
Чувствительным элементом демпфера рыскания является двухстепенной гироскоп, реагирующий на угловую скорость ωy, относительно нормальной оси Y. Этот сигнал фильтруется и усиливается в зависимости от скорости полета по сигналу от компьютера, рассчитывающего высотно-скоростные параметры (Air Data Computer). Далее сигнал поступает на рулевую машину демпфера. Перемещение штока рулевой машины суммируется с перемещением педалей от летчика и поступает на гидроусилитель руля направления. При этом перемещения рулевой машины демпфера на педали не передаются и летчик не может тактильно ощущать работу демпфера. Для контроля за его работой выведен индикатор, показывающий отклонения руля направления, вызванные работой демпфера. Удобный контроль на рулении: планка должна отклоняться в сторону противоположную развороту.
На самолетах новой комплектации с установленным интегрированным узлом связи (IFSAU) между САУ и самолетом (см. Система автоматического управления), при выпущенных закрылках сигнал демпфера усиливается на 29 % для противодействия усиливающейся поперечной устойчивости. Кроме того, на 50 % гасятся сигналы с частотой 8 герц для уменьшения вибраций и улучшения комфорта пассажиров.
Система автоматического управления
Система автоматического управления самолетом (AFCS) состоит из трех независимых систем: цифровой системы управления полетом (DFCS), демпфера рысканья (см. Боковая устойчивость и управляемость) и автомата тяги (см. Силовая установка). Эти системы обеспечивают автоматическую стабилизацию самолета по тангажу, крену и скольжению и управление самолетом по сигналам радионавигационных средств, бортового навигационного компьютера (FMC), компьютера высотно-скоростных параметров (ADC) и стабилизацию курса.
Связь между цифровой системой управления и самолетом осуществляет в зависимости от комплектации самолета узел связи (AFC) или интегрированный узел связи (IFSAU). В зависимости от этого несколько меняется работа демпфера рысканья.
Автоматическое управление самолетом осуществляется посредством руля высоты и элеронов. Также происходит автоматическое снятие усилий со штурвала в продольном канале (с возвращением штурвальной колонки в нейтральное положение) путем перестановки стабилизатора. Снятия усилий в поперечном канале не происходит, поэтому запрещено пользоваться триммером элеронов при включенной САУ.
В случае полета с несимметричной тягой двигателей пилот должен отклонением педалей самостоятельно управлять путевым каналом. В противном случае точность выдерживания заданных параметров полета не гарантирована.
Полет самолета при несимметричной тяге
 Отказ двигателя
Отказ двигателяРассмотрим поведение самолета сразу после отказа одного из двигателей и потребное управление (балансировку) для обеспечения прямолинейного полета с одним остановленным двигателем.
Пусть отказал левый двигатель. На самолет начнет действовать момент рыскания My двиг, разворачивающий его влево. Возникнет скольжение на правое крыло, следовательно, и момент крена Mxβ, в сторону крыла с остановленным двигателем.
На рисунке показано примерное изменение углов скольжения и крена при остановке левого двигателя.
Поскольку поперечная устойчивость велика (особенно с выпущенными закрылками), то накренение будет происходить энергично, так что требуется немедленное вмешательство пилота. Для парирования кренящего момента, при работе двигателя на взлетном режиме, полного отклонения штурвала по крену недостаточно. Необходимо убрать скольжение рулем направления.
 Балансировка без крена
Балансировка без кренаРассмотрим, каковы условия балансировки в длительном полете с одним неработающим двигателем. Проанализируем два специфических случая балансировки в прямолинейном полете с остановленным двигателем: 1) без крена, 2) без скольжения, а также рекомендацию фирмы Боинг.
1. Полет без крена.
Для балансировки без крена требуется создать скольжение на левое крыло. Тогда к моменту от несимметричной тяги My двиг прибавится момент от скольжения Myβ. Их уравновешивание требует большого отклонения руля направления. Боковые силы от руля направления Z рн и от скольжения Zβ будут действовать в противоположные стороны и при некотором угле скольжения уравновесятся.
Поперечный момент Mxβ будет компенсироваться моментами от руля направления Mx рн и элеронов Mx элер.
Казалось бы, для пилота прямолинейный полет без крена является наиболее приемлемым, но из-за большого потребного угла отклонения руля направления возрастает сопротивление самолета. Это ухудшает возможности самолета, особенно при отказе двигателя на взлете с большой массой и при высоких температурах.
Заметим, что хотя полет происходит здесь со скольжением, но шарик указателя скольжения расположится строго по центру. Дело в том, что аэродинамические силы в этом случае располагаются в плоскости симметрии самолета. Вообще говоря, данный прибор не является указателем скольжения, а является указателем боковой перегрузки. Боковая перегрузка возникает от нескомпенсированной аэродинамической силы Z, которая уравновешивается боковой составляющей силы тяжести G * sinγ при полете с креном или центробежной силой при развороте самолета.
2. Полет без скольжения.
 Балансировка без скольжения
Балансировка без скольженияРазворачивающий момент от двигателя My двиг балансируется моментом от руля направления My рн. Боковая сила Z рн уравновешивается боковой составляющей силы тяжести G * sinγ, при создании крена на правое крыло. Поперечный момент от руля направления Mx рн уравновешивается моментом от элеронов Mx элер. Заметим, отклонение элеронов в противоположную сторону, по сравнению с балансировкой без крена. Шарик в данном случае будет отклонен в сторону опущенного крыла, хотя скольжение будет отсутствовать.
Данный режим балансировки наиболее выгоден для энергетики самолета, поскольку обеспечивается минимальное сопротивление. Но точное выдерживание режима проблематично. Во-первых, у пилотов нет индикации угла скольжения, во-вторых, при изменении тяги работающего двигателя меняется разворачивающий момент, значит меняется потребное отклонение руля направления, соответственно меняется боковая сила руля направления, а значит и требуемый угол крена для его компенсации. Руководства по летной эксплуатации советских самолетов давали пилотам приблизительную цифру крена 3 - 5° на работающий двигатель.

Боинг дает другой критерий управления. Рассмотрим балансировочную диаграмму при отказе левого двигателя. На ней цифрами 1 и 2 показаны рассмотренные случаи балансировки без крена и без скольжения. Вместе с тем существует бесконечное множество других балансировочных положений. Боинг рекомендует пилотам балансировать самолет с нулевым отклонением элеронов (level the control wheel). Пишется, что при этом наблюдается небольшой крен на работающий двигатель и шарик немного отклонен в ту же сторону. Как видно из балансировочной диаграммы, это положение является чем-то средним между двумя рассмотренными случаями балансировки. Его удобно выдерживать, поскольку для контроля «горизонтальности» штурвала необязательно даже смотреть в кабину и можно контролировать правильность положения руля направления тактильными ощущениями руки. Какая половинка штурвала опускается, значит в такую же сторону надо отклонить педали для балансировки. Точно такая же техника пилотирования при включенном автопилоте, поскольку педали от автопилота не управляются.
Недостатки самолета
С точки зрения вопросов, касающихся аэродинамики, самолет имеет следующие недостатки:
- Несмотря на то, что самолет оборудован флюгарками, информация о текущем угле атаки пилотам не выдается (за исключением некоторых комплектаций самолетов серий 600 и далее). Подача такой информации значительно бы помогла в случаях ненадежной работы компьютера высотно-скоростных параметров, ошибочного ввода информации о весе самолета в навигационный компьютер (FMC), выводе самолета из сложного положения, заходе на посадку с различными отказами механизации и т. п.
- В законе управления двигателя отсутствует ограничение режима двигателя при достижении максимально допустимой температуры газов за турбиной. Это накладывает дополнительную нагрузку на экипаж при взлетах в жаркую погоду с большими взлетными весами по дополнительному контролю и ручной корректировке режима двигателей на самом напряженном участке взлета. Это не способствует безопасности полета.
- Самолет имеет чрезмерную поперечную устойчивость, особенно при выпущенных закрылках. Это усложняет его пилотирование и причиняет неудобства пассажирам при полете в неспокойной атмосфере.
Литература
- Аэродинамика и динамика полета магистральных самолетов. — Москва — Пекин: Издательский отдел ЦАГИ, Авиа-издательство КНР, 1995
- Лысенко Н. М. . Динамика полета. — Москва: Издание ВВИА им. проф. Н. Е. Жуковского, 1967
- Тарасенков А.М., Брага В.Г., Тараненко В. Т. . Динамика полета и боевого маневрирования летательных аппаратов. — Москва: Издание ВВИА им. проф. Н. Е. Жуковского, 1984
- Летные испытания самолетов. — Москва: Машиностроение, 1996
См. также
Ссылки





















Wikimedia Foundation. 2010.