- Степени свободы (механика)
-

В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена.
Вы можете отредактировать эту статью, добавив ссылки на авторитетные источники.
Эта отметка установлена 14 мая 2011.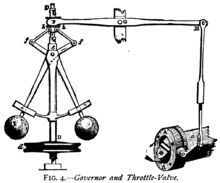 Грузики в этом центробежном регуляторе имеют две степени свободы, так как их положение в пространстве задаётся двумя координатами: 1) углом поворота вала; 2) углом отклонения рычагов от вертикали (то есть, от оси вала)
Грузики в этом центробежном регуляторе имеют две степени свободы, так как их положение в пространстве задаётся двумя координатами: 1) углом поворота вала; 2) углом отклонения рычагов от вертикали (то есть, от оси вала)
В механике, степени свободы — это совокупность независимых координат перемещения и/или вращения, полностью определяющая положение системы или тела (а вместе с их производными по времени — соответствующими скоростями - полностью определяющая состояние механической системы или тела - то есть их положение и движение). Это фундаментальное понятие применяется в теоретической механике, теории механизмов и машин, машиностроении, авиации и теории летательных аппаратов, робототехнике и других областях.
В отличие от обычных декартовых или какого-то другого типа координат, такие координаты в общем случае называются обобщёнными координатами (декартовы, полярные или какие-то другие конкретные координаты являются, таким образом, частным случаем обобщённых). По сути речь идет о минимальном наборе чисел, который полностью определяет текущее положение (конфигурацию) данной системы.
Требование минимальности этого набора или независимости координат означает, что подразумевается набор координат, необходимый для описания положения системы лишь при возможных движениях (например, если рассматривается математический маятник, подразумевается, что его длина не может меняться, и таким образом координата, которая характеризует расстояние от груза до точки подвеса не является его степенью свободы, т.к. не может меняться - то есть количество степеней свободы математического маятника в пространстве 2, а такого же маятника, могущего двигаться только в одной плоскости, 1; им соответствуют углы отклонения маятника от вертикали).
В случае, когда рассматривается система со связями (точнее говоря, с удерживающими связями), количество степеней свободы механической системы меньше, чем количество декартовых координат всех материальных точек системы, а именно:
где n - количество степеней свободы, N - количество материальных точек системы, nlink - количество удерживающих связей за исключением избыточных[1].
Количество степеней свободы зависит не только от природы реальной системы, но и от модели (приближения) в рамках которых система изучается. Даже в приближении классической механики (в которых в целом и написана данная статья) если отказаться от использования дальнейших приближений, упрощающих задачу, количество степеней свободы любой макроскопической системы окажется огромным. Поскольку связи не бывают абсолютно жесткими (т.е. на самом деле их можно рассматривать как связи лишь в рамках определенного приближения), то настоящее количество степеней свободы механической системы можно оценить как минимум как утроенное количество атомов (а в приближении сплошной среды - как бесконечное). Однако на практике используют приближения, позволяющие радикально упростить задачу и уменьшить количество степеней свободы при рассмотрении системы, поэтому в практических расчетах количество степеней свободы - конечное, обычно достаточно небольшое, число.
Так, приближение абсолютно твердого тела, являющееся примером жесткой связи, наложенной на каждую пару материальных точек тела, сводит количество степеней свободы твердого тела до 6. Рассматривая системы, состоящие из небольшого количества твердых тел, рассматриваемых в этом приближении, имеют, таким образом, небольшое количество степеней свободы, к тому же еще, вероятно, уменьшаемое наложением дополнительных связей (соответствующих шарнирам итп).[2]
Содержание
Примеры
 Этот механизм Чебышева имеет только одну степень свободы, так как его положение полностью определяется углом поворота одного (любого) из трёх подвижных звеньев — L2, L3 или L4.
Этот механизм Чебышева имеет только одну степень свободы, так как его положение полностью определяется углом поворота одного (любого) из трёх подвижных звеньев — L2, L3 или L4.- Твёрдое тело, движущееся в трёхмерном пространстве, максимально может иметь шесть степеней свободы: три поступательных и три вращательных.
- Автомобиль, если его рассматривать как твёрдое тело, перемещается по плоскости, а точнее говоря, по некоторой двумерной поверхности (в двумерном пространстве). Он имеет три степени свободы (одну вращательную, и две поступательные).
- Поезд вынужден перемещаться по рельсовому пути, и поэтому он имеет только одну степень свободы.
Движение и размерности
В общем случае твёрдое тело в d измерениях имеет d(d + 1)/2 степеней свободы (d поступательных и d(d −1)/2 вращательных).
Твердые тела. Деформируемые тела
 Кинематика самолёта: помимо трёх поступательных, самолёт имеет и три вращательные степени свободы (показаны на рисунке)
Кинематика самолёта: помимо трёх поступательных, самолёт имеет и три вращательные степени свободы (показаны на рисунке)Упругие или деформируемые тела можно рассматривать как систему множества мельчайших частиц (бесконечное число степеней свободы; в этом случае систему часто приближённо рассматривают как имеющую ограниченное число степеней свободы.
Если основным объектом анализа является движение, вызывающее большие перемещения, то для упрощения расчётов деформируемое тело приближённо рассматривают как абсолютно твёрдое, а иногда и как материальную точку. Например, если исследуется движение детали механизма, совершающей значительные перемещения, можно в главном приближении (и с хорошей точностью) рассматривать деталь как абсолютно твердое тело (при необходимости внеся затем, когда основное движение уже вычислено, поправки, связанные с ее небольшими деформациями), особенно это верно, если исследуется, например, движение спутников по орбите, а если не рассматривать ориентацию спутника, то достаточно считать его материальной точкой - т.е. ограничиться описанием спутника тремя степенями свободы.
Системы тел
 Рука робота-манипулятора с 7 степенями свободы в кинематической цепи
Рука робота-манипулятора с 7 степенями свободы в кинематической цепиСистема из нескольких тел может иметь в целом такое количество степеней свободы, которое является суммой степеней свободы составляющих систему тел, за вычетом тех степеней свободы, которые ограничиваются внутренними связями. Механизм, содержащий несколько соединённых тел, может иметь количество степеней свободы большее, чем имеет одно свободное твёрдое тело. В этом случае термин «степени свободы» используется для обозначения количества параметров, необходимых для точного определения положения механизма в пространстве.
Специфическим типом механизма является открытая кинематическая цепь, в которой жёсткие звенья имеют подвижные соединения, способные обеспечить одну степень свободы (если это петлевой шарнир или скользящее соединение), или две степени свободы (если это цилиндрическое соединение). Подобные цепи используются в основном в робототехнике, биомеханике и для космических механизмов.
Рука человека имеет 7 степеней свободы.
Робот, имеющий механизм, способный контролировать все 6 физических степеней свободы, называют голономным. Если робот имеет меньшее количество контролируемых степеней свободы, то его называют неголономным. Робот или другой объект с количеством контролируемых степеней свободы бо́льшим, чем количество физических степеней свободы, называют избыточным.
Определение степеней свободы механизмов
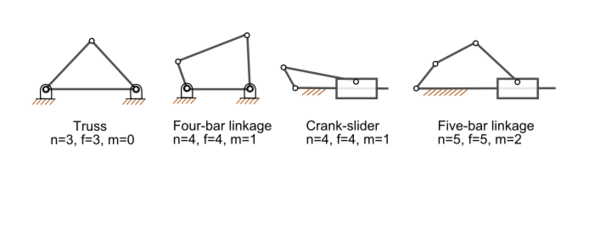 Определение количества степеней свободы плоских механизмов: m — количество степеней свободы; n — количество звеньев механизма (включая одно неподвижное звено); f — количество подвижных соединений звеньев
Определение количества степеней свободы плоских механизмов: m — количество степеней свободы; n — количество звеньев механизма (включая одно неподвижное звено); f — количество подвижных соединений звеньевБольшинство обычных механизмов имеют одну степень свободы, то есть, имеется одно входное движение, определяющее одно выходное движение. Кроме того, большинство механизмов являются плоскими. Пространственные механизмы более сложны для расчётов.
Для расчётов степеней свободы механизмов применяется формула Чебышева — Граблера — Кутцбаха (англ.).
В наиболее простом виде для плоских механизмов эта формула имеет вид:
 , где
, где
 — количество степеней свободы;
— количество степеней свободы; — количество звеньев механизма (включая одно неподвижное звено — основание);
— количество звеньев механизма (включая одно неподвижное звено — основание); — количество кинематических пар с одной степенью свободы (петлевое или скользящее соединение);
— количество кинематических пар с одной степенью свободы (петлевое или скользящее соединение);
В более общем виде формула Чебышева — Граблера — Кутцбаха для плоских механизмов, содержащих более сложные соединения звеньев:
 , где
, где
 Простые механизмы способны создавать сложное движение
Простые механизмы способны создавать сложное движениеИли для пространственного механизма (механизма, имеющего трёхмерное движение):

- — количество степеней свободы;
- — количество звеньев механизма (включая одно неподвижное звено — основание);
 — общее количество подвижных соединений звеньев, не рассматривая количество степеней свободы этих соединений;
— общее количество подвижных соединений звеньев, не рассматривая количество степеней свободы этих соединений; — сумма всех степеней свободы всех подвижных соединений (шарниров).
— сумма всех степеней свободы всех подвижных соединений (шарниров).
Гидропривод
Количество степеней свободы гидравлической системы может быть определено простым подсчётом количества независимо управляемых гидродвигателей.
Электротехника
В электротехнике понятие «степени свободы» часто используется для описания количества направлений, в которых фазированная антенная решётка может проектировать свои лучи. Оно на единицу меньше, чем количество элементов, содержащихся в решётке.
Принцип возможных перемещений
В теоретической механике известен принцип возможных перемещений, который также, как и уравнения равновесия статики, позволяет находить внешние силовые воздействия, действующие на механическую систему. Количество уравнений, составленных, исходя из принципа возможных перемещений, равно количеству степеней свободы данной механической системы.
Степени свободы молекулы
Основная статья: Степени свободы (физика): Степени свободы молекулы
Формула внутренней энергии газа:
 ,
,
где
 — количество степеней свободы молекулы газа,
— количество степеней свободы молекулы газа, — масса газа,
— масса газа, — молярная масса газа,
— молярная масса газа, — универсальная газовая постоянная,
— универсальная газовая постоянная, — абсолютная температура газа,
— абсолютная температура газа,
- включает количество степеней свободы молекулы.
Эта формула важна для расчётов, например, двигателей внутреннего сгорания.
Примечания
- ↑ Например, если зафиксированы расстояния от данной точки до трех точек абсолютно твердого тела, то фиксация расстояний от данной точки до других точек того же твердого тела будет избыточным, т.к. они будут сохраняться автоматически.
- ↑ Однако следует иметь в виду, что, как и всякая модель, такая модель заставляет при ее использовании платить определенную реальную цену: модель абсолютно твердого тела полностью игнорирует любые колебания и распространение волн в твердом теле, к которому она применяется. Впрочем, как обычно, она может быть применена в качестве нулевого приближения, а необходимые уточняющие поправки могут быть потом вычислены отдельно, и возможно, это можно будет делать с меньшей точностью, если они малы.
Литература
- Тарг С. М. Краткий курс теоретической механики. Учеб. для втузов.— 10-е изд., перераб. и доп. — М.: Высш. шк., 1986.— 416 с, ил.
- Основной курс теоретической механики (часть первая) Н. Н. Бухгольц, изд-во «Наука», Главная редакция физико-математической литературы, Москва, 1972, 468 стр.
Категории:- Механика
- Механизмы
- Размерный анализ







Wikimedia Foundation. 2010.